
Many INS performance issues are related to having a poor or faulty heading solution. The basis of a translational solution is dead reckoning an estimated velocity over a period of time based on the heading of the system. If the heading is off, the translation solution will be as well.
-
Spinning heading. A heading that is constantly spinning or running is typically an indication of a poor bias compensation from the gyro. When the INS boots, it calculates the bias of the gyros to compensate the gyro data prior to putting it into the solution. If this bias is calculated incorrectly, it will be applied incorrectly and will result in a bias being fed into the solution. This typically occurs if the INS experiences significant rotational rates during the spin up process. This can also occur if the INS has a failing gyro. If the INS is using a magnetic sensor to aid the heading estimate, a spinning heading could indicate a failing magnetic sensor or the presence of a large magnetic interference.
-
Oscillating heading. An INS that uses a magnetic sensor as an aiding heading input may experience an oscillating heading if the magnetic sensor is oscillating or if the gyro has significant noise. An oscillating heading more than a 1 degree peak-to-peak is pretty uncommon unless there is a sensor fault. For MEMS-based gyros aided by a magnetic heading sensor, a heading oscillation less than 1 degree peak-to-peak is not that uncommon but may suggest the filter requires tuning.
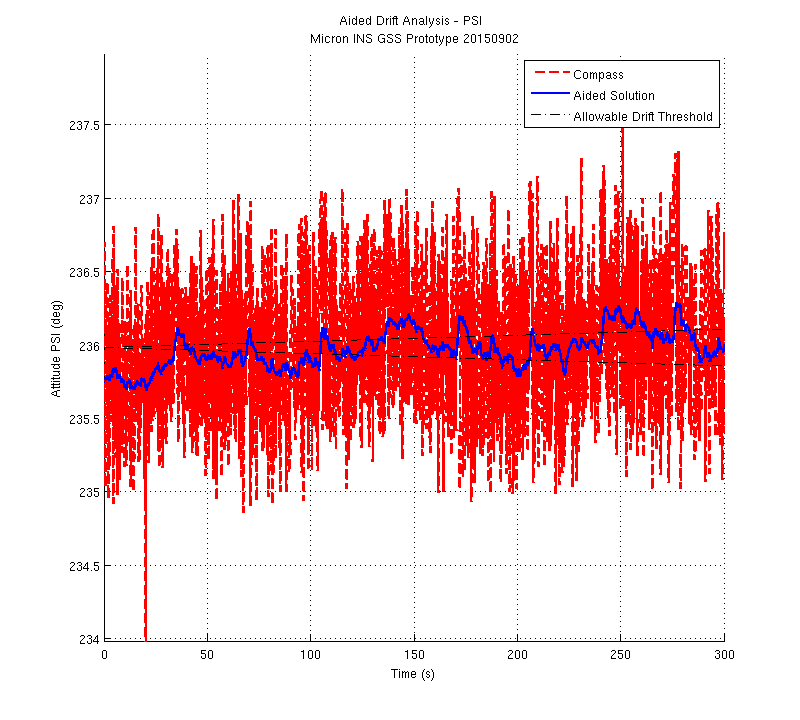
Illustration 1:
Typical heading oscillation in a MEMS-gyro, magnetically compensated, system. Approximately 0.25deg peak-to-peak oscillation may be acceptable depending on the quality of the IMU. Note the general oscillation in the IMU data in this example.
-
Heading overshoot and settling. If the heading on a system is noted to overshoot and settle back to a value during a dynamic motion, the filter may be improperly configured for the IMU and aiding sensor combination. While some overshoot is expected due to the nature of the filter, this should not be noticeable to a user.
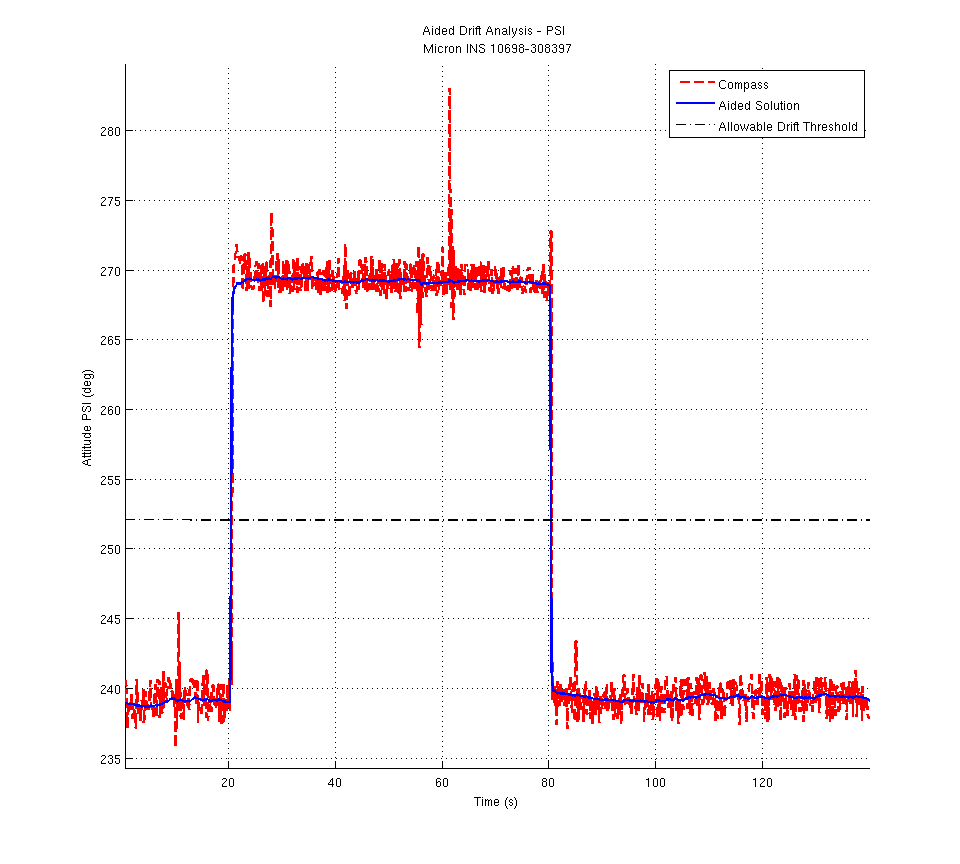
Illustration 2:
Reasonable heading solution (blue) performance during dynamic maneuvers.
-
Incorrect heading. Assuming the INS is not a true north seeking INS, if the heading is wrong after a long steady state, there is an issue with the magnetic compass or with the alignment or transform of the unit. Likely causes could be a poor magnetic calibration or the presence of a magnetic interference. To verify an incorrect heading, be sure the INS has a sufficient amount of time to settle. After a long settling time (greater than a minute) the IMU and filter will have little effect on the heading value. After verifying the transform and ensuring there is no magnetic disturbance, calibrating the compass may correct this problem.
-
Heading is off by a cardinal degree. This is commonly due to an incorrect orientation transform.
-
Poor heading alignment on a reciprocal. On a magnetically aided system, poor heading alignment on reciprocal is a clear indicator of a poor magnetic calibration. Performing a magnetic calibration on the magnetic aiding sensor will typically correct this problem.
-
Heading drifts. An IMU drifts. While not ideal, it is a fundamental characteristic of inertial sensors. The drift of any IMU used in a navigation device should be on such a long timescale that operators will not notice it during normal operation. A MEMS IMU may cause the heading solution to drift less than a degree an hour, while a FOG IMU may cause the heading solution to drift less than a degree a day. Greensea's INS algorithms use Zero Velocity Correction methods to manage drift. Holding the heading perfectly still for approximately 10 seconds should cause the system to recalculate and apply a bias to all states. This should reset any drift caused by the IMU.