Depth UnitsThe Depth units can be set to meters or feet in the User Settings dialog box. You can also adjust the low and high values of the range as well as the grid spacing. [ Educational Resources Library ] [ Help us improve this document ] [ Print this page |
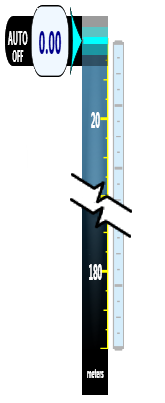
Depth GaugeThe Depth Gauge displays the depth of the ROV and the Auto Depth status. The Depth Gauge is also used to engage and set Auto Depth. Display
UseThe depth of the ROV is indicated as a number in the flag, which moves along the scale proportionally to the depth. As the ROV moves deeper, the flag moves down the scale. As the ROV moves towards the surface, the flag moves up the scale. The vertical thruster setting indicator is on the right side of the Depth Gauge. When there is no thrust applied, this indicator becomes transparent. When thrust is applied, a green shaded section appears within the indicator. The length of the green shading from the horizontal centerline indicates the amount of user input applied for the vertical thruster. Vertical up thrust (to move the vehicle towards the surface) is indicated by a green shading above the horizontal centerline. Vertical down thrust is indicated by a green shading below the horizontal centerline. The Auto Depth control/indicator is to the left of the Depth flag. Auto Depth can be used to make the ROV hover at the current depth or surface or dive to a user specified depth. See the Auto Depth section of the Operations Guide for details on using Auto Depth. The size and display of the Depth Gauge can be adjusted. See the Instruments section of this guide for more information.
|
Pro 4 Operator's Manual