|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
Copyright NoticeThis material is copyright protected. No material may be reproduced or transmitted in any form or by any means for any purpose without expressed written consent of VideoRay LLC. Copyright © 2022, VideoRay LLC - The Global Leader in Micro-ROV Technology |
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
About this DocumentOnline ManualThis printed Quick Start Guide is a subset of the full version of this manual, which is available on the Pro 4 Ultra control panel and online in the following formats:
The VideoRay Pro 4 Ultra has sophisticated features, but is easy to use and maintain once you learn its capabilities and the proper operating techniques. This documentation will guide you through your first dive and provide additional details to help you learn all aspects of its operation.
Document OrganizationThis documentation is organized into several guides.
Document ConventionsSeveral symbols are used throughout this documentation to add emphasis and to assist in relocating important information. The following table describes these symbols and their uses.
Beyond this DocumentThere is no substitute for experience and/or training, especially with respect to the real purpose for which you plan to use this equipment. We encourage you to explore options beyond the scope of these materials to expand your knowledge and skills necessary to support your applications. In addition to this documentation, VideoRay offers training and technical support and hosts a general user discussion forum and user image gallery. We also realize that collectively, users of our products spend considerably more time operating our systems than we do ourselves. Users also encounter more diverse operating environments across an extremely broad range of applications. We highly value this vast experience base, and invite and encourage you to share your experiences and suggestions with us. Please feel free to contact us by any of the methods listed below. Quality CommitmentVideoRay strives to design, manufacture, deliver and support the highest quality products and services, including this documentation. We have made every effort to ensure that this documentation is accurate and provides you with the most up-to-date information. If you find any errors in this documentation or have suggestions for improvements, each page contains a "Help us improve this document" feedback link in the left margin (you must be connected to the Internet to use this link).
DisclaimerThis document is deemed accurate at the time of its writing, however it is not a legal contract and the information contained herein should not be construed to represent any form of commitment. This document as well as the associated products and services are subject to change without notice. |
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
How to Get HelpHelp for your Pro 4 Ultra is available through several channels. All Hours Self-Service / Crowd-Source Tools
Global Support
Regional Support
Training
Operational Strategies and Tactics SupportIf you need help understanding how to apply your system to a specific project, contact VideoRay or you local VideoRay dealer. We can provide guidance or help you find a certified consultant. |
Before Contacting SupportPlease make sure to consider the following information before contacting VideoRay's Technical Support to report a problem. The following information should available:
Once you have collected the recommended information, visit the "How to Get Help" page for contact information. In addition, please review VideoRay's Support website for additional information about:
|
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
Pro 4 Ultra OverviewVideoRay is pleased to present the latest model in its top-of-the line professional series Micro-ROVs - the VideoRay Pro 4 Ultra. Like the Pro 3, the Pro 4 Ultra was designed for performance and maintainability, but has entirely new internal electronics, including camera, LED lights, processor, and added sensors. With powerful brushless motors, the Pro 4 Ultra further extends VideoRay's position as the fastest and most powerful tether pulling vehicle. Additional improvements include deeper depth rating, hydrodynamic streamlining, and optimized ballast adjustment. Topside control is based on industry standard computers, with new software that integrates several functions while dynamically reconfiguring for ease of use. The Pro 4 Ultra submersible builds on VideoRay's strengths with more than twice the vertical thrust of the Pro 3, and 50% greater horizontal thrust. A depth rating of 300 meters (1000 feet) is standard. Improvements in the electronics allow for both greater total tether length up to 600 meters (2000 feet) and much better power transmission over longer tethers. Existing VideoRay tethers can be used with the Pro 4 Ultra - and different tether types can still be combined to meet different operational requirements. New sensors, including 3 axes compass and accelerometers and MEMS gyro improve navigational capabilities. The primary video camera features ultra low light and Wide Dynamic Range imaging capability, with a wide range of user controllable parameters for demanding imaging situations. Coupled with the very high intensity LED lighting, the images and video that can be captured are far clearer, particularly in difficult lighting conditions. An optional external camera can be rotated 360 degrees to provide lateral views as needed. The topside control configuration replaces inflexible and limited switches and knobs with context-sensitive controls that go beyond simply controlling the submersible to controlling navigation, sonar, image and video capture, and other sensors and accessories in addition to the submersible. This "systems approach" significantly reduces operator workload and distraction caused by separate systems for sonar, navigation, video capture, and vehicle control. Additionally, VideoRay recognizes that technology is only as good as the people who use it. Successful organizations focus on training and systematic procedures for operations and maintenance. The VideoRay Pro 4 Ultra package includes features that help owners and operators develop, implement and execute ROV operations and maintenance programs more efficiently and effectively. These features include customizable documentation, online interactive operating checklists and knowledge and skill assessment tools. Companies with one system or an entire fleet can leverage these capabilities to ensure that their investment in VideoRay equipment continues to return value throughout its life. |
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
Quick Start InstructionsThese Quick Start Instructions are streamlined to cover just the essentials of operating your Pro 4 Ultra system. They are provided to get you started as quickly as possible, while keeping you and the equipment safe. They cover the equipment set up and basic operation, but are not intended to result in a comprehensive base of knowledge or set of operational and piloting skills. The remaining sections of this documentation should be referenced for a complete understanding of the features, capabilities, operating procedures and maintenance requirements of your Pro 4 Ultra system.
Topics in this Section |
Safety First
How Safe Is Safe Enough?Addressing all aspects of safety while working in a water environment is beyond the scope of this documentation. VideoRay encourages you to participate in safety training appropriate for your industry and applications, including such topics as vessel operations, first aid, survival and other relevant topics. |
Introduction to the System ComponentsUnpack the system and familiarize yourself with the components.
Additional ItemsAdditional items may be supplied with your system including tools, spare parts and other items. If included, these items are described in other sections of this documentation. Some items shown may be optional and not included with your configuration. |
Pre-Dive Preparations
The pre-dive preparations consist of five parts:
VideoRay Cockpit includes an online interactive Pre-Dive checklist. See the Pre-Dive Checklist section of the VideoRay Cockpit Guide Conduct a Visual InspectionAssuming this is your first time using the VideoRay, everything should be in proper working order and ready to go, but it is good practice to perform a pre-dive inspection before every dive, even your first. If any problems are noticed, they should be addressed before continuing. Refer to the Diagnostics and Repair section of the Maintenance Guide and take appropriate corrective action, or contact VideoRay for assistance before commencing the dive.
Make the ConnectionsIt is best to start making connections at the ROV and working your way to connecting the system to the power source.
Some of the cables have been connected at the factory. See the appropriate sections of the Equipment Guide for detailed information about each of the connections. You will typically need to connect only the ROV, tether, strain relief hand controller, and power cord.
Power On Tests
The VideoRay Pro 4 Ultra includes one circuit safety component.
Testing the Circuit Safety ComponentConnect the power cord to a suitable power source. The GFCI can be found inline in the power cord.
Power On TestsSet the Power switch to the On position. The green Power On indicator light should turn on. If the green Power On indicator light is not on, make sure the system is connected to a working power source and the GFCI switch is turned on. Starting the VideoRay Cockpit Control SoftwareMake sure the system is connected to a working power source and the GFCI / Circuit Breaker and Power switches are turned on.
See the Software Guide for more information about the VideoRay control software. Testing the System's FunctionsThe next step is to ensure that the essential features of the ROV are functioning properly. Use the hand controller to perform the following tests. The manipulator functions listed below do not necessarily represent the full capabilities of the system. See the Hand Controller section of the Equipment Guide for the complete list of functions and more information about using the hand controller.
Test the thrusters
Test the lights
Test the camera functions
Good AdviceThe time to catch small problems before they become big problems is during the pre-dive inspection.
View example cartridge seals |
Dive OperationsAfter the previous four pre-dive checks and tests have been completed successfully, you are almost ready to commence the dive. But, there is one more issue to address that could affect the performance of the ROV. The ROV is designed to be operated in a near neutrally buoyant configuration, so the last step before launching your VideoRay is to check the buoyancy, and adjust the ballast if necessary. For most operations, the buoyancy is optimal when the top of the float block is even with the water surface and the ROV is level. If the ROV is too buoyant or too heavy, the vertical position may be hard to maintain or control.
Buoyancy Check and AdjustmentTo determine if the buoyancy is correct, lower the ROV and at least 3 meters (10 feet) of tether into the water. You can lower the ROV by the tether - it will not hurt the tether because there is Kevlar in it. Observe the ROV in the water - it should not be floating too high or sink. It should also be floating level and not tipped to one side or pitched up or down. If the ROV floats too high, you will need to add some ballast weights. If the ROV sinks, you will need to remove some ballast weights. If the ROV is not floating level, you can change the locations of the weights. The buoyancy can be adjusted by adding or removing the supplied ballast weights to the vehicle. To open the skid pods, turn the ROV upside down. Press on the buttons on the sides of the pod, and lift up on the pod shell. The weights can be added to or removed from the slots by hand. For most operations, the weights should be evenly distributed to provide a balanced attitude of the ROV in water. Commence the DiveOnce the buoyancy has been adjusted the ROV is ready to launch. Lower it into the water and operate the controls to maneuver it. The ROV can be lowered using the tether.
For your first dives, practice until you are comfortable operating the controls without looking at them and you are able to control the ROV with some precision.
Practice Makes PerfectDeveloping the skills to operate your Pro 4 Ultra like an expert may take some time. Practicing on a regular basis is highly recommended. |
Post-Dive OperationsAt the conclusion of your dive, retrieve the VideoRay and power down the system by closing VideoRay Cockpit, shutting down the computer and turning off the Power switch. Make sure the ROV is secure before disconnecting the tether. After disconnecting the tether, keep the tether connectors clean and do not let them drag on the ground. Proper maintenance of your VideoRay system ensures a long service life and that it will be ready to operate when you are. After each dive, you should visually inspect the system for damage that might have occurred during your operation. VideoRay Cockpit includes an online interactive Post Dive checklist. See the Post Dive Checklist section of the VideoRay Cockpit Guide
DebriefingCongratulations! You are well on your way to becoming an accomplished micro-ROV operator, but there are still many things to learn and skills to master. Continue learning about the system by reviewing the additional sections of this documentation and, most importantly, practice, practice, practice. If you encountered any difficulties or have any questions, review these Quick Start Instructions and the other documentation that came with your system, including the Equipment Guide and Maintenance Manual. If you still have difficulty or questions, contact VideoRay. Your success is our success, and we are here to help you get the most out of your VideoRay.
Ready to Learn More?To accelerate your learning and receive recognition for your knowledge and skills, VideoRay offers in-person classes and online training as well as the Micro-ROV User Certificate program. Training can be delivered at your site and customized to your needs. To learn more about these opportunities, click on the training link above to visit the VideoRay Educational Resources website. |
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
Equipment GuideUnderstanding the features and capabilities of the Pro 4 Ultra equipment is essential to get the most value out of using the system. The sections within this Equipment Guide provide details about each of the components. Topics in this Section |
System Voltage AdvisoryAC InputInput voltage is universal at 100-240 VAC; 50, 60 Hz. The power requirement for the Mission Specialist operating at full power settings is 3,000 Watts. A 2,000 Watt source (i.e. generator) can be used if the system will not be used at full power settings. ROV DC PowerHistorically, the tether voltage to power the ROV has been increasing. Economy models (including the Scout, Explorer and Voyager), Pro 3 variants and the Pro 4 Ultra use 48 V DC for vehicle power. The Pro 4 uses 74 V DC. Mission Specialist systems uses 400 V DC with plans to use higher voltages in the future. Systems with voltages higher than 48 V DC include a LIM (Line Insulation Monitor) protection module in the ROV DC circuit.
VideoRay Negative, Neutral and PPT tethers are rated to 600 V DC and are safe to use on any system through the Mission Specialist 400 V DC.
The new version of the extended TDS is available that includes a 600 V rated slip ring. If you have any questions about system voltage and compatibility, contact VideoRay Support. |
ROV
The Pro 4 Ultra ROV (Remotely Operated Vehicle) is depth rated to 300 meters (1000 feet). Thrusters provide mobility and are controlled from the surface using the hand controller. The ROV carries cameras, lights and other sensors to the underwater locations being searched, explored or inspected. The primary ROV components are illustrated below. Note that the yellow float block and clear vertical thrust splitter have been removed from the top of the ROV.
 |
Operator Control ConsoleThe Operator Control Console provides power, communications and a video interface between the surface and the ROV through the tether. The computer, which runs VideoRay Cockpit software to control the ROV, is housed in the Operator Control Console along with a second display monitor .
Operator Control Console Power SpecificationsThe VideoRay Pro 4 Ultra operates on typical residential power in the range of 100-240 Volts AC, 50,60 Hz. This can be provided from the land-based grid, a generator, or a battery with an inverter (optional). The typical power requirements for operating from a generator or inverter are 800 Watts continuous minimum. The system includes a GFCI (Ground Fault Circuit Interrupter) / Circuit Breaker to protect the operator. There is one universal IEC power outlet on the back of the Operator Control Console. this outlet is protected by the GFCI. The GFCI must be on to use this outlet, but the Operator Control Console power switch does not need to be on. The power in the tether is 48 Volts DC. The procedures for testing the circuit safety component can be found in the Pre-Dive Preparations section of the Quick Start Instructions.
Display Monitor Tilt Armhe Display Monitor Tilt Arm on the left side of the Operator Control Console can be used to adjust the angle of the Operator Control Console lid and monitor. To adjust the angle of the monitor, loosen the locking collar, adjust the lid to the desired angle and tighten the locking collar.
|
Safety CircuitThe Operator Control Console includes one safety circuit component.
GFCI (Ground Fault Circuit Interrupter)The GFCI protects the operator from shock from the AC circuit of the power source. The GFCI is inline with the power cord. When initially connected to a power source, it is in the Off state. You must press the Reset Button to enable it. When enabled, the green LED will be illuminated.
LIM (Line Insulation Monitor)The LIM protects the operator and persons in the water nearby from shock from the DC circuit of the tether. While the GFCI switches are part of the GFCI component and must be turned on to operate the Operator Control Console, the LIM is automatically enabled when the system is turned on. The LIM operates on a principle similar to the GFCI and monitors the quality of the insulation of the conductors in the tether. If the resistance between the conductors drops below the safe threshold, the LIM will trip. See the Operator Control Console Switches and Connections section for more information about the GFCI's location, and see the Pre-Dive Preparations section of the Quick Start Instructions for information about testing this component. |
Hand ControllerThe hand controller is used to operate the VideoRay and its features. Several types of hand controllers are supported, including the following styles:
The hand controller functions are described in more detail in the following pages of this guide. Hand Controller SupportAny Microsoft® Windows® compatible game controller can be used with the Ultra, but each controller requires a configuration file to map the joystick, buttons and knobs to the ROV functions. VideoRay Cockpit currently includes two hand controller configuration files, the VideoRay industrial hand controller, and the Logitech®. These controllers are auto detected on start-up. Other controller configuration files are available online from VideoRay for these and/or other controllers. Customer controller configuration files can also be created by users. See the Hand Controller Customization section of the Customization Guide for more information. Microsoft is a registered trademark of Microsoft. Windows is a registered trademark of Microsoft. |
IP65 Controller
Hand Controller Connection
|
Tether
Tether connects the ROV to the surface and provides power, communications, video and an APIC (Auxiliary Pair of Independent Conductors) for accessory use. The tether consists of conductors, a Kevlar® strength member, flotation (for Neutral and Performance tethers) and an outer jacket. It is available three types: Negative, Neutral and Performance (often called PPT), and can be purchased in standard and custom lengths. Neutral and Performance are neutrally buoyant in fresh water because they have a specially designed foam jacket. While larger conductors provide the best power transmission capacity, they lead to thicker tethers, which results in higher drag. Negative tether has the largest conductors (best power transmission capacity), followed by Neutral, and then Performance. Negative and Performance tether have the smallest diameter (least drag), while Neutral tether has the largest diameter. The tether connectors are wet mateable and can be connected while they are wet. One of the pins in the connector is offset. To connect the tether to the ROV, control panel or another tether, align the offset pin of the connectors and press the two connectors together until the base surface of each connector are touching each other. Then, connect the tether locking sleeves by screwing them together to secure the connection.Multiple tethers can be connected in series like conventional power extension cords. See the Tether Management section of the Operations Guide for recommended tether configurations.
Smart TetherKCF Technologies manufactures the Smart Tether, which can be used to track and record the location of the ROV. See the Smart Tether Guide for more information |
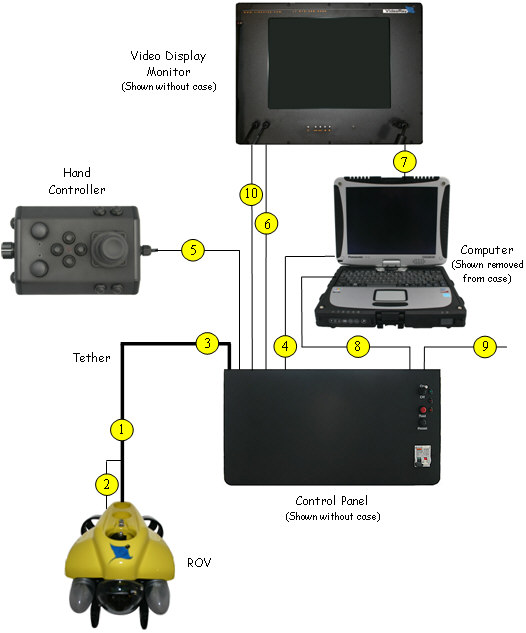
Connections SummaryConnections Summary - see the descriptions below the figure for each numbered connection.
|
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
VideoRay Cockpit GuideProgram Start-up ProcedureVideoRay Cockpit can be started using the desktop icon, or by selecting it from the Start->All Programs->VideoRay menu. Interface OverviewVideoRay Cockpit is the Pro 4 Ultra's control software. It communicates your control inputs to the ROV, and provides feedback from the ROV's video and sensor systems. VideoRay Cockpit consists of a Video Window, the Control Instruments and the Control Bar. Each of these items will be described in more detail in the following sections.
Topics in this Section |
Video WindowThe video window consists of four parts: 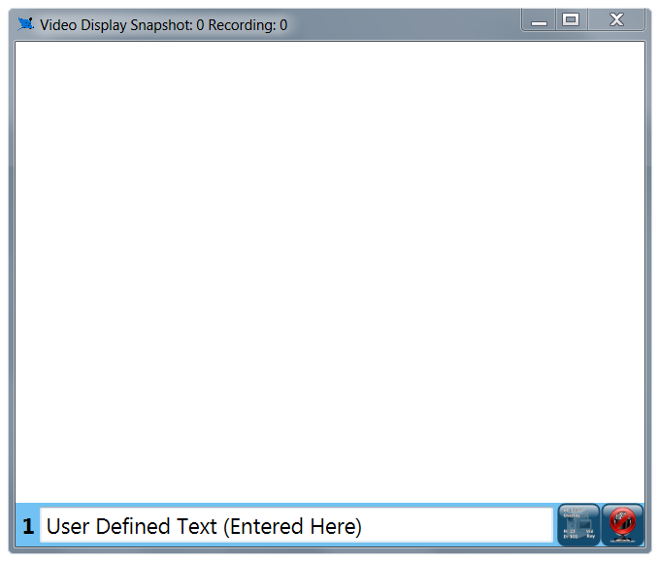
Video Window Title BarThe video window title bar displays the number of snapshots and video recordings captured during the current session. When video is being recording the word "Active" and the current video file size is also displayed. These numbers are not retained when you close VideoRay Cockpit. If there are no snapshots or recordings, no information is displayed. Video Display AreaThe video display area displays the video from the active camera, which can also include the text overlay. When video is being recorded, a flashing red dot is displayed in the upper right. When audio is being recorded (not muted), the word "Audio" appears under the flashing red dot. The flashing red dot and the word "Audio" are for information only and are not recorded. Video Text OverlayThe video text overlay controls enable the display of the date, time, ROV sensor data, and digital on-screen graphic (logo) to be overlaid on the video image. Audio Recording and MutingRecorded audio can be used to add narration to the video in real time. Whenever video is being recorded, audio is also being recorded to the same file. The audio can be muted to eliminate background noise or unwanted conversations. The Audio Mute button can be found in the lower right corner of the video window. Microphone selection can be made using the Video Settings section of the System Settings tab of the User Settings. Microphone volume adjustments can be made using the standard Microsoft Windows audio settings and properties. |
InstrumentsIn addition to controlling the Pro 4 Ultra and displaying video, VideoRay Cockpit provides numerous feedback and control instruments. These instruments float on the desktop and can be moved, resized, turned on or off or made transparent. You can also restore their sizes and positions to their default locations. VideoRay Cockpit Display with Instruments Highlighted
Toggling Instruments between Opaque and Transparent IndividuallyTo make an instrument transparent, double click on it with the right mouse button. To restore an instrument to opaque, double click on it again with the right mouse button. Closing InstrumentsTo close an instrument, hover the mouse over the instrument, and then move the cursor toward a border. When the cursor reaches the border, the border will highlight and an "X" will appear in the upper right. Click on the "X" to close the instrument. See the section below and the User Settings and Instrument Display sections for more information about how to close and reopen instruments. Additional Control MethodsIn addition to the operations above that work directly on individual elements, there are other methods to control instruments individually or as a group. User SettingsThe Instruments tab within User Settings allows you to turn instruments on or off individually. The Instruments tab also has a button to restore all of the instruments to their default sizes and locations. See the User Settings Section of the VideoRay Cockpit Guide. Control Bar ToolsThe Control Bar has three tools that allow you to close all instruments, make them all transparent, or make them all opaque. See the Instrument Display Control Section of the VideoRay Cockpit Guide. Instruments Display Control HierarchySome settings methods take precedence over other settings methods.
|
ROV Health IndicatorThe ROV Health Indicator provides status information for several key operational parameters, including the power management system, power, communications, internal humidity and internal temperature. Display
The ROV Health Indicator displays the following information (from left to right):
UseThe status indicators are green if the status is okay, but change to red if a problem is detected.
If a problem is detected, corrective action should be taken. See the Diagnostics and Repair section of the Maintenance Guide for more information. The size and display of the ROV Health Indicator can be adjusted. See the Instruments section of this guide for more information. |
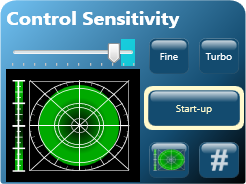
Control SensitivityThe Control Sensitivity Instrument allows you to adjust how responsive the ROV is to joystick and depth control inputs. The control sensitivity is determined by the values of control gains, which range from 0 to 100. The control input applied by the operator is multiplied by the gain before being sent to the ROV as a command to drive the thrusters. A gain setting of 100 and maximum control input will result in the thrusters operating at full available power. If the gain is reduced, the same maximum control input will result in correspondingly less thruster power. Lower gain settings allow the operator to have more precise control over the vehicle at the expense not having the maximum power available. For example, new users may find it easier to pilot the ROV using lower gain settings until they get used to the handling characteristics of the vehicle. A gain setting of 0 will result in no thrust for any level of control input, and a boost mode allowing numbers of up to 110 is available - see the boost mode below.
Display
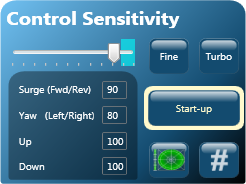
UseYou can independently control the sensitivity of the following control parameters:
There are two ways to set the sensitivity, visually or numerically. In addition you can save three favorite settings for easy recall. Adjusting the Sensitivity VisuallyTo adjust the control sensitivity visually, click on the graph button in the lower right hand corner of the control sensitivity instrument. The left hand side of the instrument will display a vertical bar on the left for Vertical Up and Down gains, and a polar grid area on the right for the Surge and Yaw gains. The green shaded region in both areas gives a visual indication of the gain settings. Left click and drag the vertical bar to set the Vertical gain symmetrically for up and down. Right click and drag to set the up and down gain independently. The top of the bar is for Vertical Up thrust and the bottom for Vertical Down thrust. Likewise, left click and drag in the polar region to set the Surge gain (indicated by the top and bottom values) and Yaw gain (indicated by the left and right values). When you left click and drag, the gains are adjusted symmetrically as indicated by the circular green shaded area. Right click and drag in the polar region to adjust the Surge independent of the Yaw. The top and bottom of the polar area are for Surge and the left and right are for Yaw. You can also move the slider above the graph area to decrease or increase all of the gain settings uniformly. Moving the slider to the left decreases the gains and moving it to the right increases the gains. For the surge and Yaw, when clicking and dragging with the left button, the gains are set to the radius of the circle at the point of release. Adjusting the Sensitivity NumericallyTo adjust the control sensitivity numerically, click on the number (#) button in the lower right hand corner of the control sensitivity instrument. The left hand side of the instrument will list the control parameters and display input fields for the gains. You can enter a number from 1 to 100 in each of the input fields. Adjusting the Sensitivity Using the SliderYou can also move the slider at the top to decrease or increase all of the numbers uniformly. Moving the slider to the left decreases the gains and moving it to the right increases gains. Saving Favorite Settings for RecallThe Control Sensitivity Instrument also has three buttons for quickly setting the gains to preset or saved values. Advanced SettingsFor maximum power availability when needed, the gains should be set to the boost mode. |
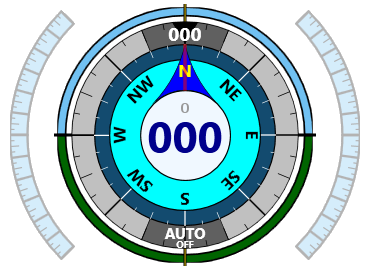
Compass and Attitude IndicatorThe Compass Instrument displays a variety of information, including the heading of the ROV, the Auto Heading status, an artificial horizon to indicate the attitude of the ROV, and the horizontal thruster settings. The Compass Instrument is also used to engage and set Auto Heading. Display
The Compass and Attitude Indicator displays the following information:
UseThe central portion of the Compass displays the heading of the ROV. The heading in degrees clockwise from North is listed at the center of the dial. The compass uses a "heading up" display so that the heading of the ROV is always displayed under the reference indicator at the top center of the compass dial. For example, if the ROV is heading SE, the South indicating arrow will be displayed to the right of the heading indicator, as shown above. Turning the ROV to the right towards South will cause the compass dial to rotate counter-clockwise so that South will move towards the indicator. The small number above the heading is the Variation entered in the User Settings and represents the local magnetic declination. The declination is set by the user - see the section below about Compass Declination. The blue and green ring around the Compass/Auto Heading is the Attitude Indicator, which acts like an artificial horizon. It indicates the pitch and roll of the ROV. The horizon is represented by the horizontal interface line between the top blue section (sky) and the bottom green section (earth). When the ROV pitches down to a nose low attitude, the amount of green increases and the interface line moves up within the circle. The reverse is true when the ROV pitches up. When the ROV rolls to the starboard (right), the interface line rotates to the left indicating that the starboard side is closer to the sea floor. The reverse is true when the ROV rolls to the port (left). The outer bands on the left and right of the Compass are the horizontal thrusters settings indicators. The left side displays the port thruster setting, and the right side displays the starboard thruster setting. When there is no thrust applied, these indicators become transparent. When thrust is applied a green shaded section appears within the bands. The length of the green shading from the horizontal centerline indicates the amount of user input applied for that thruster. Forward thrust is indicated by a green shading above the horizontal centerline. Reverse thrust is indicated by a green shading below the horizontal centerline. Compass Declination and CalibrationThe compass declination can be set to match the local magnetic declination. See the Compass section under User Settings for more information. The compass is calibrated at the factory. For most operations, the compass should not need to be calibrated. If you are doing precise survey work or using VideoRay CoPilot's autonomous piloting products, you may need to calibrate the compass. See the Compass Calibration section under Engine Room for more information. Notes
|
Ribbon CompassThe Ribbon Compass Instrument displays the heading of the ROV in a compact horizontal scrolling format and provides reference indicators that mark the field of view for the standard camera. Display
The Compass displays the following information:
UseThe Compass displays the heading of the ROV. The heading in degrees clockwise from North is listed at the center of the instrument. The compass uses a "heading up" display so that the heading of the ROV is always displayed above the heading reference indicator at the bottom center of the compass instrument. For example, if the ROV is heading SE, the South indicating arrow will be displayed to the right of the heading indicator, as shown above. Turning the ROV to the right towards South will cause the ribbon compass background to slide to the left so that South will move towards the indicator. The camera field of view indicators can be used to estimate the bearing offset from the current heading to any object in the camera's view. Compass Declination and CalibrationThe compass declination can be set to match the local magnetic declination. See the Compass section under User Settings for more information. The compass is calibrated at the factory. For most operations, the compass should not need to be calibrated. If you are doing precise survey work or using VideoRay CoPilot's autonomous piloting products, you may need to calibrate the compass. See the Compass Calibration section under Engine Room for more information. |
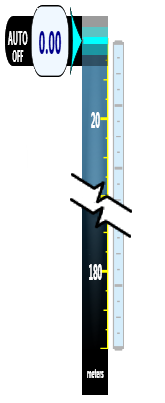
Depth GaugeThe Depth Gauge displays the depth of the ROV and the Auto Depth status. The Depth Gauge is also used to engage and set Auto Depth. Display
The Depth Gauge displays the following information:
UseThe depth of the ROV is indicated as a number in the flag, which moves along the scale proportionally to the depth. As the ROV moves deeper, the flag moves down the scale. As the ROV moves towards the surface, the flag moves up the scale. The vertical thruster setting indicator is on the right side of the Depth Gauge. When there is no thrust applied, this indicator becomes transparent. When thrust is applied, a green shaded section appears within the indicator. The length of the green shading from the horizontal centerline indicates the amount of user input applied for the vertical thruster. Vertical up thrust (to move the vehicle towards the surface) is indicated by a green shading above the horizontal centerline. Vertical down thrust is indicated by a green shading below the horizontal centerline. The Auto Depth control/indicator is to the left of the Depth flag. Auto Depth can be used to make the ROV hover at the current depth or surface or dive to a user specified depth. See the Auto Depth section of the Operations Guide for details on using Auto Depth. The size and display of the Depth Gauge can be adjusted. See the Instruments section of this guide for more information.
Depth UnitsThe Depth units can be set to meters or feet in the User Settings dialog box. You can also adjust the low and high values of the range as well as the grid spacing. |
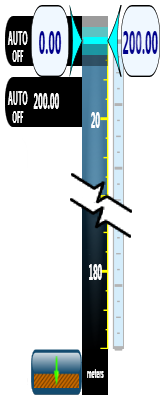
(Pseudo) Altimeter Gauge
The Altimeter Gauge displays the altitude of the ROV and the Auto Altitude status. The Altimeter Gauge is also used to engage and set Auto Altitude. Pseudo AltimeterNormally, an altimeter (optional accessory) is required to use the Altitude Gauge, but in some situations an altimeter is not required. If the bottom is flat and the depth is known, such as in a tank, the pressure sensor / Depth Gauge (and a little math) can be used to determine the altitude. See below and the Depth Gauge section of the User Settings for information about using the Pseudo Altimeter. Display
The Altimeter Gauge displays the following information:
UseThe altitude of the ROV is indicated as a number in the flag, which moves along the scale proportionally to the altitude. As the ROV moves higher, the flag moves up the scale. As the ROV moves towards the bottom, the flag moves down the scale. The vertical thruster setting indicator is on the right side of the Altimeter Gauge. When there is no thrust applied, this indicator becomes transparent. When thrust is applied, a green shaded section appears within the indicator. The length of the green shading from the horizontal centerline indicates the amount of user input applied for the vertical thruster. Vertical up thrust (to move the vehicle towards the surface) is indicated by a green shading above the horizontal centerline. Vertical down thrust is indicated by a green shading below the horizontal centerline. The Auto Altitude control/indicator is below the Auto Depth control/indicator. Auto Altitude can be used to make the ROV hover at the current altitude or surface or dive to a user specified altitude. See the Auto Altitude section of the Operations Guide for details on using Auto Altitude. The size and display of the Altitude Gauge can be adjusted. See the Instruments section of this guide for more information.
Altimeter UnitsThe Altimeter units can be set to meters or feet in the User Settings dialog box. You can also adjust the low and high values of the range as well as the bottom depth and grid spacing. |
Camera and Lights IndicatorThe Camera and Lights Indicator displays information about the ROV's camera and the lights. The Camera and Lights Indicator Instrument is also used to select the active camera when an external camera is in use, and activate the camera menu system for the front camera. Display
UseThe Camera and Lights Indicator provides feedback on the camera tilt position, camera focus and intensity of the lights. The Camera Tilt angle relative to the horizontal centerline of the ROV is indicated by the light blue pointer and curved scale, and the tilt angle is also displayed as a number. The tilt indicator pointer rotates about the central circle to represent the tilt position of the camera. The tilt angle is displayed as positive number when the camera tilted about the horizontal, and negative when the camera is tilted below the horizontal. The Camera Focus position is indicated by the white line, and the focus position is also displayed as a number. When the focus changes from near to far, the focus line moves from the center of the tilt indicator to the outside end of the tilt indicator. The focus position number ranges from 0 for full near focus to 100 for full far focus. The scale is not a linear indication of the focus distance. It is a measure of the focus motor position. The Camera Switch button can be used to select whether the front or external camera is active. Click the Camera Switch button to switch from the front camera to the external camera. Click the Camera Select button again to switch back from the external camera to the front camera. The title of the Camera Indicator changes to reflect which camera is active The Camera Menu button can be used to activate the camera menu to make adjustments to the camera settings. See the Camera Menu section of this guide for more information. The Camera Tilt Indicator button can be used to activate the camera tilt and focus indicator after using the camera menu. The Lights Indicator provides feedback on the intensity of the lights as a bar scale and a number. As the lights intensity increases more bars light up. The range of the lights indicator number is from 0% for Off to 100% for full On. The size and display of the Camera and Lights Indicator can be adjusted. See the Instruments section of this guide for more information.
|
Camera Menu Operation and Default SettingsThe VideoRay Pro 4 Ultra camera includes sophisticated features that can be used to enhance the image quality in various lighting conditions. These features are controlled through the camera menu system. The camera menu can be accessed by clicking on the Menu button on the VideoRay Cockpit camera instrument. This will display the menu as text overlaid on the video window. Each menu item represents a sub-menu where settings can be adjusted.
Camera Menu NavigationAfter clicking on the Menu button, the camera menu displays in the video window and the camera instrument displays menu navigation buttons. Click on the up and down arrow buttons to navigate from one sub-menu to the next. Once the desired sub-menu is highlighted, activate the sub-menu by clicking on the left or right arrow buttons. You can also use the keyboard arrow keys to navigate the menu.
Within a sub-menu, use the up and down buttons or keys to navigate from one feature to the next. Features can be changed by using the left or right buttons or keys. To exit a sub-menu, navigate to the Return sub-menu item and activate it using the left or right buttons or keys. To exit the main menu, navigate to the Exit menu item and activate it using the left or right buttons or keys. Menu and Menu Button Synchronization
Camera Menu Defaults
Additional NotesQuick Tip to Restore DefaultsTo quickly restore the camera to the recommended VideoRay Pro 4 Ultra camera menu default settings, first, restore the factory default settings, and then change the Lens Type to "ELC" and the Level to "6" in the Lens sub-menu, and change the DSS setting to "1X" in the Exposure sub-menu and change the WB Mode to "PUSH" in the White Balance sub-menu. Menu Button FocusIf the camera menu is active and you click on some other window element, such as the instrument transparency feature, the camera menu will lose focus. To restore focus to the camera menu, click on the camera instrument. |
Control BarThe Control Bar can be used to control various settings, launch integrated applications, access this user documentation and close VideoRay Cockpit. Display
UseThe control bar is displayed at the bottom of the primary monitor. It contains a series of buttons. Moving from right to left, the buttons are as follows:
Each of these controls will be described in the following sections. The version number of the software is displayed in the lower left of the control bar. Only the primary version number is displayed. Hover your mouse over the version number for the full version and build number. |
Close VideoRay Cockpit
The Close button can be used to close, or stop, VideoRay Cockpit. You can also click on the traditional Windows® Close button in the upper right hand corner of the video window to stop VideoRay Cockpit.
Windows is a registered trademark of Microsoft. |
Open the VideoRay Cockpit Help File
The Help button opens this documentation in a browser window.
|
Open the Service Bay
The Service Bay provides access to diagnostic and routine maintenance information. It also includes interactive Pre-Dive and Post Dive checklists that can be logged to a file.
On the left hand side of the Service Bay window are buttons to activate the interactive Pre-Dive and Post Dive checklists and the scheduled maintenance utility. See the next sections for more information. The main section of the Service Bay window provide system status of the computer and software. Below this window are buttons to save and print this information. A third button displays the log file from the last time VideoRay Cockpit was run. The information in the report and log can help diagnose VideoRay Cockpit problems or computer problems that might affect the ability to run VideoRay Cockpit. A fourth button opens the VideoRay Cockpit configuration folder. The button on the far left opens the Communications Status window. Open the VideoRay Cockpit Configuration Folder
Show the Error Log
Each time VideoRay Cockpit is run, it writes a log file. The information in this file can be used for diagnostics purposes if the program execution is interrupted for any reason. Print the Diagnostics Report
The diagnostics report can be printed for review by other parties. Save the Diagnostics Report
The diagnostics report can be saved for logging or transmission via email for technical support purposes. View the Diagnostics Console
The diagnostics console displays program activity in real time. See Diagnostics Console for more information. View the Communications Status
The communications status of the ROV and other devices can be displayed in real time. See Communications Status for more information. |
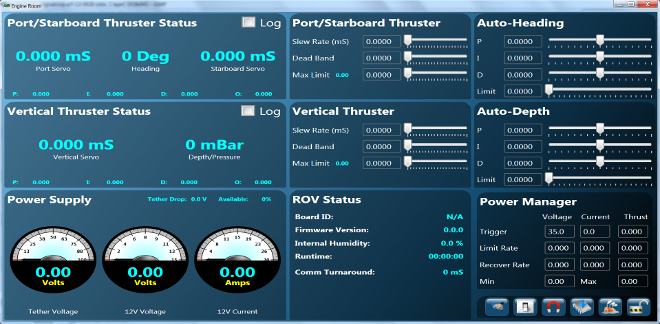
Engine Room
The Engine Room button opens the engine room window. The engine room provides diagnostics information, firmware management and advanced systems tuning.
|
Access Images and Videos
The Access Images and Videos button opens the folder that contains VideoRay data including digitally recorded images and videos. Recorded images and videos are stored in the VideoRay\Imagery\ folder, which can be found in the computer account user's documents folder (Documents\ for Windows 7, or My Documents\ for Windows XP).
|
Open the User Settings
The User Settings button opens the User Settings window. Within the User Settings, users can control the instruments display, systems settings, data import and export, and network remote connections.
Topics in this Section |
Instruments SettingsThe Instruments Settings tab allows you to control the display and other properties of the instruments.
Topics in this Section
Alternate MethodsThere are other methods to control the display of instruments. They can be controlled individually or through the Control Bar. See the Instruments and the Control Bar sections of the VideoRay Cockpit Guide for more information. |
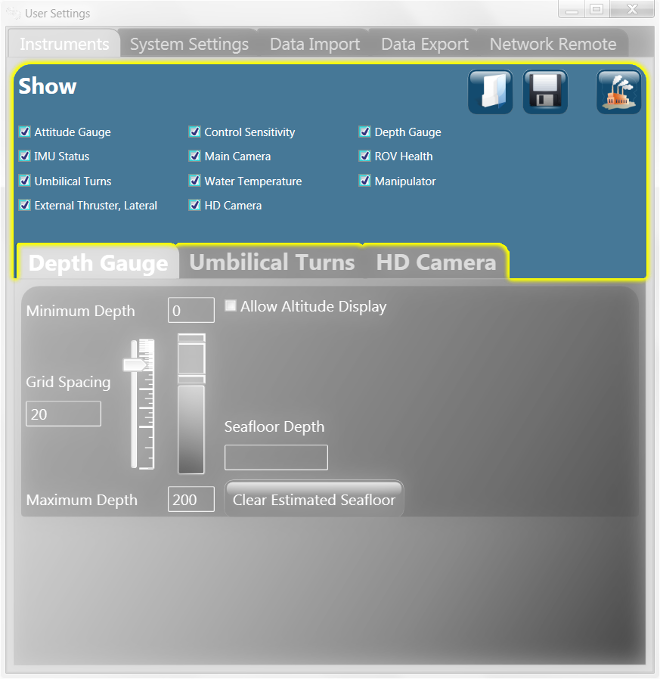
Instruments Display
Turning Instruments On and OffThe top section of the Instruments Settings tab allows you to turn On or Off the display of instruments individually. Check the box next to the instrument to turn its display On. Uncheck the box next to the instrument to turn its display Off.
Saving Instruments SettingsThe sizes, locations and On / Off state of instruments can be saved. Instruments settings are stored by name, so you can have multiple saved sets and switch according to job type or user preference.
Load Instruments SettingsUse the Load Instruments Settings button to select a saved instruments set. Click on the Load Instruments Settings button and browse to select the desired saved instruments set and restore it. See the Save Instruments Settings next for information about to save an instruments set. Save Instruments SettingsWhen the instruments are arranged as desired, click on the Save Instrument Settings button to store the arrangement. Enter a file name and click on the Save button. Restore Instruments Settings to Factory Default ValuesThe Restore Instruments Settings to Factory Default Values button restores all instruments to their default size and location. |
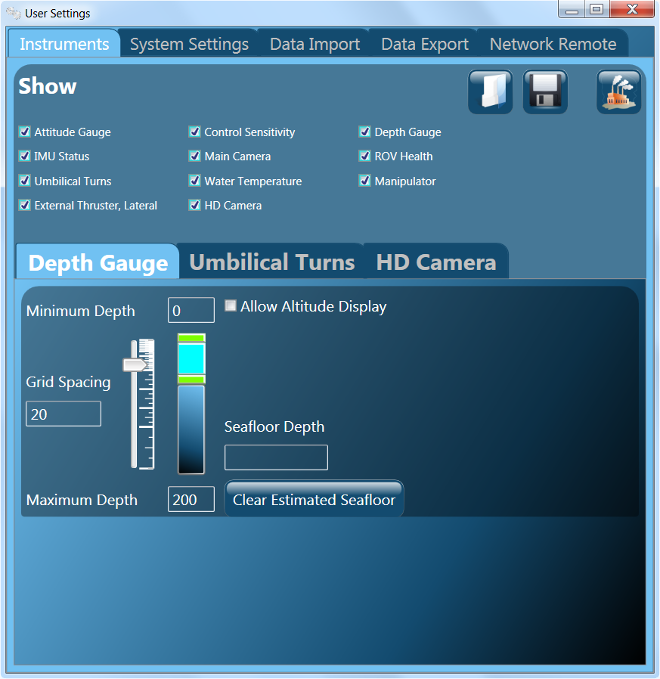
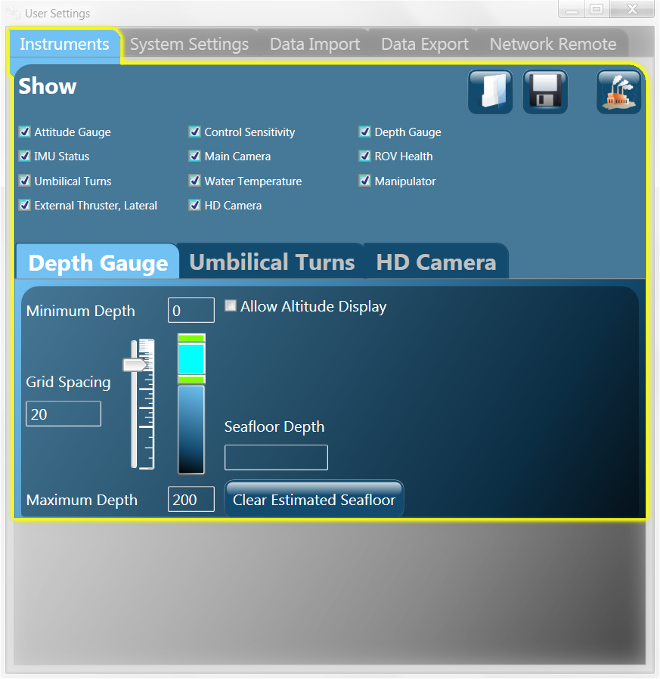
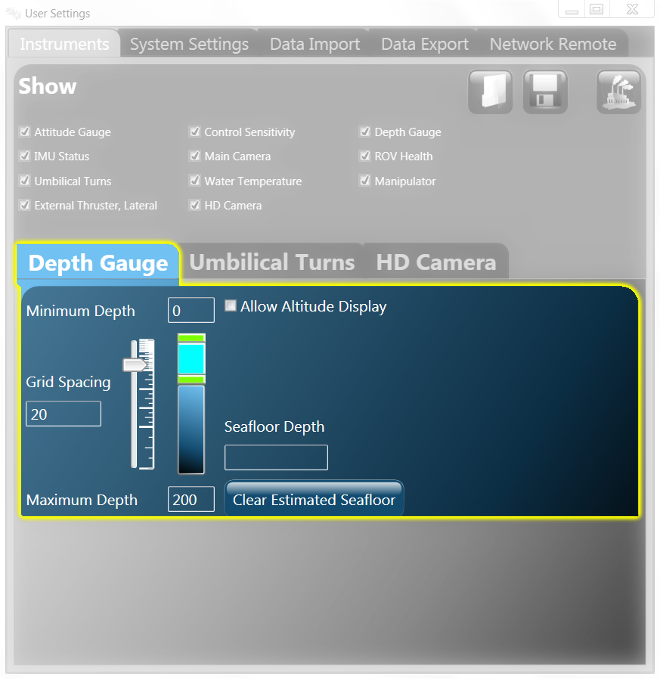
Depth Gauge Settings
The Depth Gauge tab of the Instrument Settings tab allows you to adjust the depth gauge scale and altimeter settings. You can set the minimum depth, the maximum depth and the grid spacing displayed on the depth gauge. These properties can be set by entering values or by clicking with the left mouse button and dragging the sliders. You can drag the grid slider to adjust the grid spacing. You can drag the top green bar to set the minimum depth, you can drag the bottom green bar to set the maximum depth, or you can drag the blue bar to change both ends of the range simultaneously
Restoring Factory DefaultsThe factory default settings for instruments can be restored by clicking on the Restore Factory Defaults button in the upper right hand corner of the Instruments Settings window. |
Turns Indicator Settings
The base orientation of the Turns Indicator can be adjusted.
Setting the Turns Indicator Base OrientationTo adjust the base orientation of the Turns Indicator arrow use either of the following methods:
Clearing the Turns Indicator Base OrientationTo clear the base orientation of the Turns Indicator arrow, either key in 0 in the Based Heading field, or click on the clear Base Heading button. Additional InformationSee the sections on the Turns Indicator instrument and Relative Heading for more information about using the Turns Indicator settings. |
System SettingsThe System Settings tab allows you to adjust various system parameters.
The Systems Settings tab allows you to adjust system parameters in the following areas. |
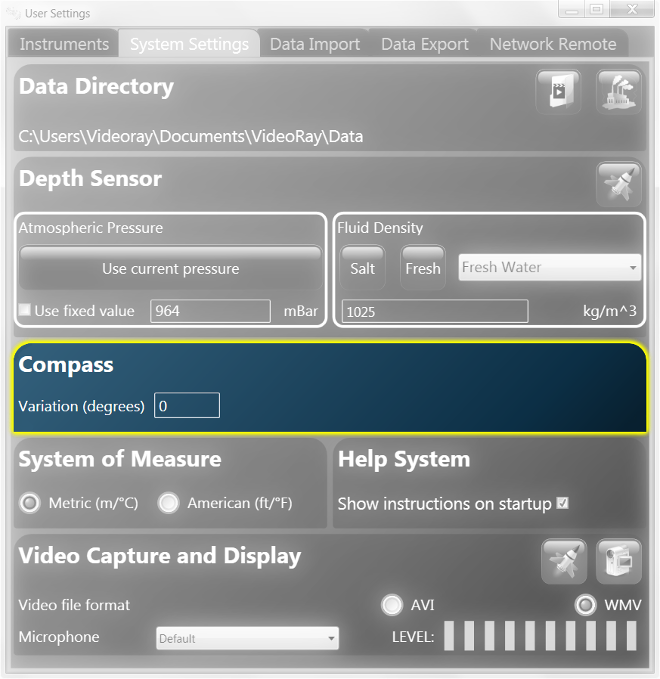
Compass
The ROV compass system is designed to display headings relative to Magnetic North. You can enter a local compass variation to account for magnetic declination. The declination is considered positive when the Magnetic North is East of True North. The value you enter is numerically added to the heading from the ROV. For example, if you are in an area with a declination of 15 degrees West, the ROV heading will read +15 degrees when the ROV is facing True North (assuming no variation has been entered). You should therefore enter -15 for the variation, which would result in a correct True North reading of 0 when the ROV is pointed True North.
Finding Declination
|
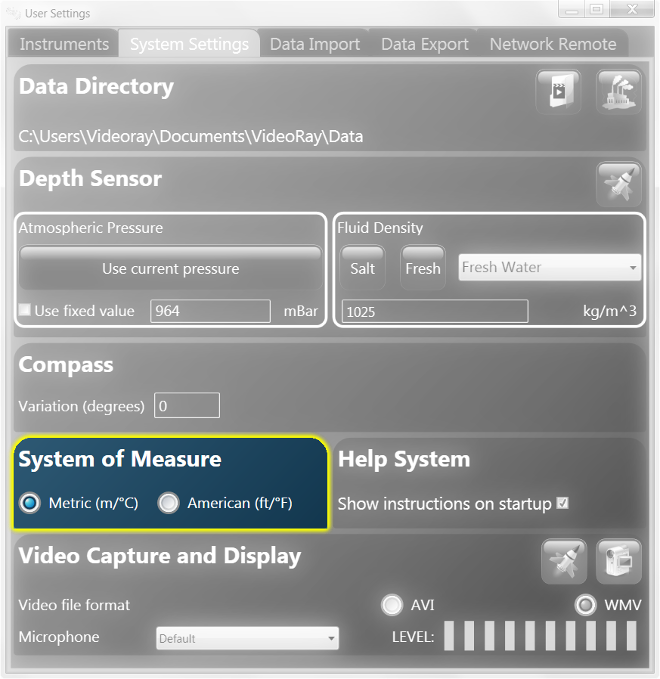
System of Measure
You can select the units used for display, choosing between either Metric or American. Click on the radio button preceding the desired system of units. Converting Units
|
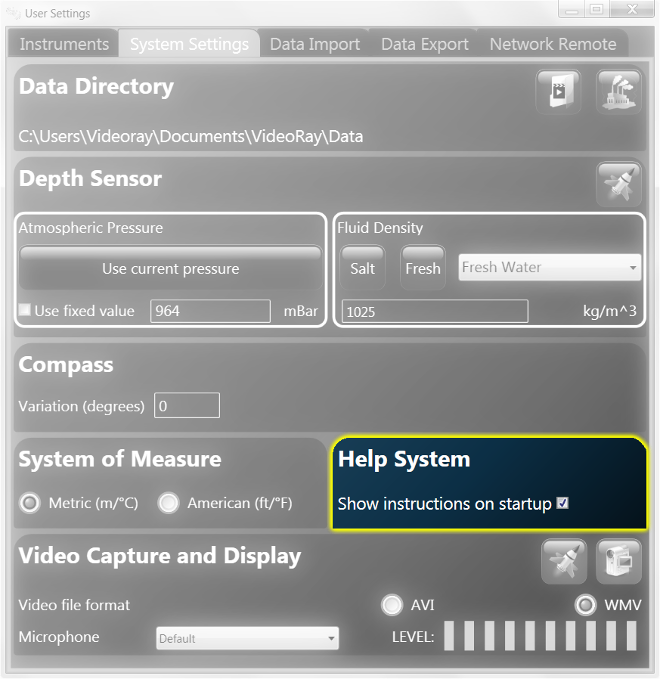
Help System
By default, the Help system is designed to open when VideoRay Cockpit is started. If you do not want the Help system to open when you start VideoRay Cockpit, uncheck the "Show instructions on startup" checkbox. You can always access the Help system from Help button on the Control Bar. |
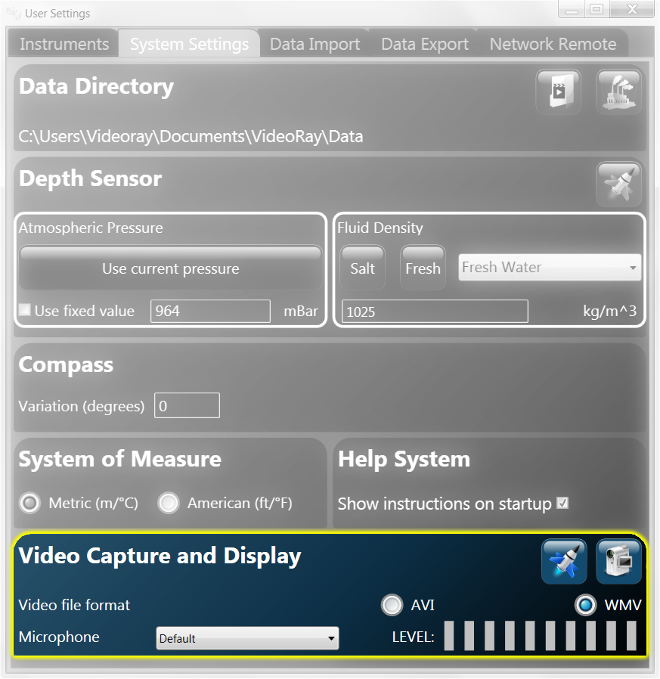
Video Capture and Display
The Video Capture and Display settings allow you to select the video format and adjust advanced video settings.
Video File Format for RecordingThe video file format can be one of the following:
* - MP4 recording requires a separate video codec that can be purchased separately. Audio SettingsThis section also includes audio microphone selection and microphone input level meter. |
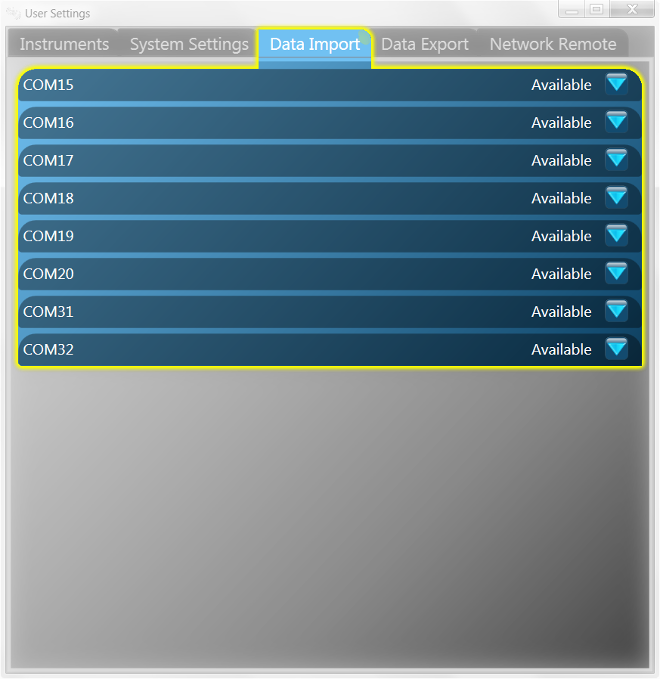
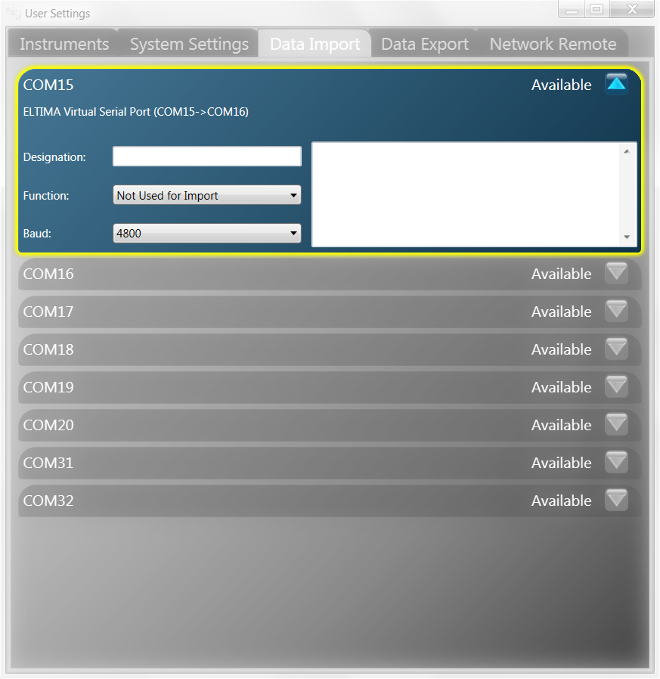
Data Import
Data Import can be used to read data from sensors or other applications and display the information on the VideoRay Cockpit video as overlay text.
Data Import reads data from a COM port. Either a physical COM port or virtual COM port can be used. Virtual COM ports can be used to allow two programs on the same machine to talk to each other. An example might be to have the KCF Smart Tether send the ROV position data to VideoRay Cockpit, so that the position of the ROV can be recorded as overlay text on the video image. See the Application Integration section for more information about virtual COM ports. Support is provided for NMEA* formatted text data. NMEA data is automatically parsed to find Position (typically from GPS) or Distance (typically from a tether payout sheave). UseTo use Data Import, you must select the port from which you want to import data and then configure the port. Ports are selected by clicking on the drop down arrow on the right hand side.
Once the port has been selected, you must configure the following items:
After configuring the port, the background will be green if the port is open and receiving data, red if the port cannot be opened, and brown if the port is operating properly, but no data is being received. Examples
When a port is set up, the setup background will turn green when communications have been established and data is being received. If communications have been established with the selected COM port, but no data is being received, then background will turn light brown. If no communications have been established with the selected COM port, the background will turn red. * - For more information about NMEA and NMEA data standards, see http://www.nmea.org. |
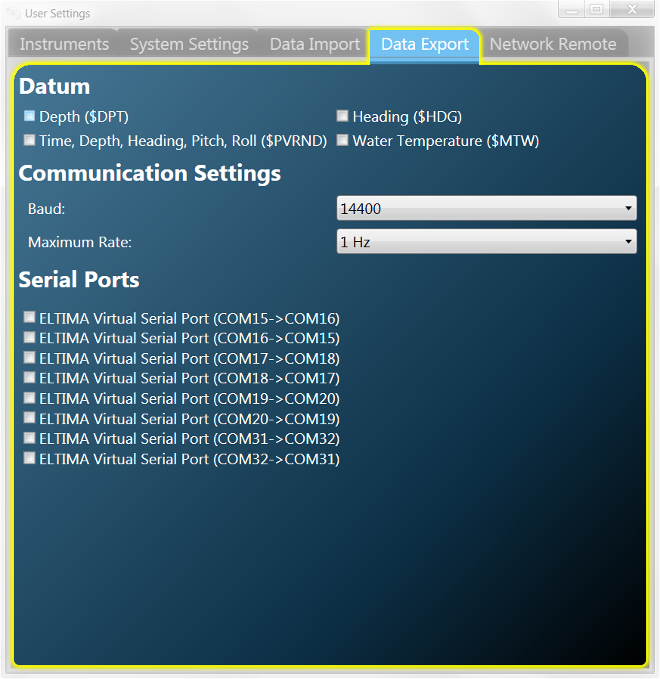
Data Export
Data Export can be used to send VideoRay Cockpit and ROV data to other applications.
Data Export sends data as NMEA* formatted text strings and supports four different types of output strings:
Data Export sends data to a COM port. Either a physical COM port or virtual COM port can be used. Virtual COM ports can be used to allow two programs on the same machine to talk to each other. An example might be to have VideoRay Cockpit send the ROV Depth to a program that could log and/or graph the depth profile of the mission. See the Application Integration section for more information about virtual COM ports. To use Data Export, you must configure the data type, Baud rate and frequency of output (Maximum Rate) and then select the port to which you want to export data.
Data Export FormatThe prototypical format conforms to NMEA standards and can be expressed in general terms as:
Example OutputDepth - $VRDPT,d.d,o.o*cs
Heading - $VRHDG,h.h,d.d,a,v.v,b*cs
Water Temperature - $VRMTW,x.x,u*cs
ROV Attitude - $PVRND,mm/dd/yyyy,hh:mm:ss.s,d.d,h.h,p.p.r.r*cs
* - For more information about NMEA and NMEA data standards, see http://www.nmea.org or http://www.tronico.fi/OH6NT/docs/NMEA0183.pdf. |
Launch Companion Applications
Several optional companion applications can be launched from the control bar. Currently, the applications that are integrated include VideoRay CoPilot, BlueView ProViewer, KCF Smart Tether, Tritech SeaNet and Tritech Micron.
|
Instruments DisplayThe Control Bar includes several buttons that can be used to modify the behavior of the instruments and their display.
|
Lock/Unlock Instruments Sizes and LocationsThe Pro 4 Ultra Instruments are Locked by default and cannot be moved or resized.

The sizes and locations of instruments can be locked so that you don't accidentally resize or move them. If the Lock Instruments Sizes and Locations button shows the lock icon, the instruments sizes and locations will be locked. If the Lock Instruments Sizes and Locations button shows the unlock icon, the instruments can be resized and moved. The lock or unlock state applies to all instruments, but does not affect the visibility settings of the instruments. See the Instruments section for more information about resizing and moving instruments. |
Set Instruments Display Opaque
There are three buttons on the control bar to manage the display properties of instruments. You can turn off all instruments, make them all transparent, or make them all opaque. These buttons work on all instruments as a group rather than individually. All Instruments Opaque - Turns the display of all instruments opaque. Alternate MethodsThere are other methods to control the display of instruments. They can be controlled individually or through User Settings. See the Instruments and the User Settings sections of the VideoRay Cockpit Guide for more information. |
Set Instruments Display Transparent
There are three buttons on the control bar to manage the display properties of instruments. You can turn off all instruments, make them all transparent, or make them all opaque. These buttons work on all instruments as a group rather than individually. All Instruments Transparent - Turns the display of all instruments transparent. Alternate MethodsThere are other methods to control the display of instruments. They can be controlled individually or through User Settings. See the Instruments and the User Settings sections of the VideoRay Cockpit Guide for more information. |
Set Instruments Display Off
There are three buttons on the control bar to manage the display properties of instruments. You can turn off all instruments, make them all transparent, or make them all opaque. These buttons work on all instruments as a group rather than individually. All Instruments Off - Turns off the display of all instruments. Alternate MethodsThere are other methods to control the display of instruments. They can be controlled individually or through User Settings. See the Instruments and the User Settings sections of the VideoRay Cockpit Guide for more information. |
ROV Materials ListThe following is a list of materials used in the exterior portions of the vehicle and tether:
Users may check this list against chemical compatibility charts available from several sources. This information is provided for convenience. Providing this information does not explicitly or implicitly extend the warranty to cover the use of VideoRay products in solutions that are not specifically listed in the Environmental Compatibility section. VideoRay is not responsible for errors or omissions in any of the presented information.VideoRay can provide engineering services for a fee to determine chemical compatibility. Contact VideoRay for more information. |
Project ManagementWhile the differences between conducting a recreational dive, an inspection of an offshore well riser, and a drowning victim recovery are quite dramatic, each of these dive missions usually consist of the following phases:
Of course, how critical a successful outcome is deemed and how much lead time and how many resources are available will dictate how much effort can or will be afforded to each phase. The essential knowledge and skills required for a consistent ability to "get the job done" go well beyond just being able to set up and pilot an ROV. In this section, the following topics will be discussed to help broaden your understanding of the scope of practical ROV applications. |
|
|
Pro 4 Ultra
Operator's Manual, 2.00.00 |
Region Specific InformationThe following sections contain information that only applies in specific regional locations. See your region for information that may pertain to you. |
European Union (EU)The following sections are specific to the European Union. |
The Waste Electrical and Electronic Equipment Regulations (WEEE) 2013In accordance with the requirements of the Waste Electrical and Electronic Equipment Regulations 2013, all non fixed electrical and electronic equipment must be disposed of correctly at the end of its useful life through an authorised waste company, and there is an associated requirement to obtain the correct paperwork as per Duty of Care legislation. Please ensure that you treat this equipment as WEEE when you come to dispose of it. |