


Data Export
Data Export can be used to send VideoRay Cockpit and ROV data to other applications.
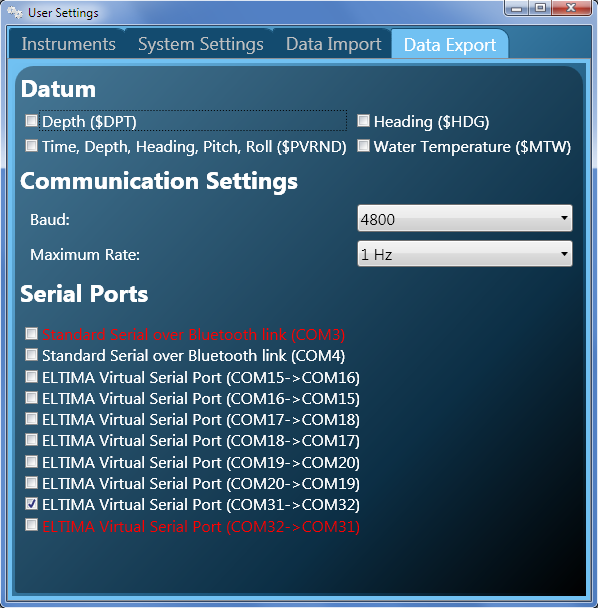
Data Export sends data as NMEA* formatted text strings and supports four different types of output strings:
- Depth ($DPT)
- Heading ($HDG)
- Water Temperature ($MTW)
- Time, Depth, Heading, Pitch, Roll ($PVRND)
Data Export sends data to a COM port. Either a physical COM port or virtual COM port can be used. Virtual COM ports can be used to allow two programs on the same machine to talk to each other. An example might be to have VideoRay Cockpit send the ROV Depth to a program that could log and/or graph the depth profile of the mission. See the Application Integration section for more information about virtual COM ports.
To use Data Export, you must configure the data type, Baud rate and frequency of output (Maximum Rate) and then select the port to which you want to export data.
![]() To save data to a file, you can use a terminal emulation program, such as or Tera Term or PuTTY, as the receiving application and save the session data to a log file.
To save data to a file, you can use a terminal emulation program, such as or Tera Term or PuTTY, as the receiving application and save the session data to a log file.
Data Export Format
The prototypical format conforms to NMEA standards and can be expressed in general terms as:
|
Example Output
Depth - $VRDPT,d.d,o.o*cs
|
Heading - $VRHDG,h.h,d.d,a,v.v,b*cs
|
Water Temperature - $VRMTW,x.x,u*cs
|
ROV Attitude - $PVRND,mm/dd/yyyy,hh:mm:ss.s,d.d,h.h,p.p.r.r*cs
|
![]() You can select more than one output string. Each string will be written in sequence.
You can select more than one output string. Each string will be written in sequence.
![]() You can select more than one COM port and export to several applications simultaneously.
You can select more than one COM port and export to several applications simultaneously.
* - For more information about NMEA and NMEA data standards, see http://www.nmea.org or http://www.tronico.fi/OH6NT/docs/NMEA0183.pdf.



