|
|
CoPilot RI
Operator's Manual, 2.00.00 |
|
|
|
CoPilot RI
Operator's Manual, 2.00.00 |
Copyright NoticeThis material is copyright protected. No material may be reproduced or transmitted in any form or by any means for any purpose without expressed written consent of VideoRay LLC. Copyright © 2022, VideoRay LLC - The Global Leader in Micro-ROV Technology |
Language Support
|
Table of Contents |
About this DocumentVideoRay CoPilot RI is a VideoRay Pro 4 accessory. Information about the VideoRay Pro 4 can be found in the VideoRay Pro 4 Operator's Manual. This manual provides the following:
Target AudienceThis manual is designed and developed for operators of the VideoRay Pro 4 MicroROV with a sonar and a DVL who are required to operate the VideoRay remotely operated vehicle (ROV) systems using VideoRay RI CoPilot. Document NavigationYou can navigate through the documentation to specific topics using the menu, or step through sequentially using the Next and Previous arrowhead buttons. The Next button will step you from the current topic to the next topic at the same level unless the current topic has a sub-topic. If the current topic has a sub-topic, the Next button will step you into the first sub-topic. The Previous button works similarly, but in reverse sequence. Your current location within the document is shown as a "breadcrumb" trail at the top of each page under the document title. You can click on any level of the breadcrumb hierarchy to go that location. You can also use the following keyboard shortcuts:
Links are shown in brown font. Finding InformationThis document includes a Table of Contents, Glossary / Index and Google search on each page. You must be connected to the Internet in order to be able to use the Google search, and you can select whether to search VideoRay's online document library only (the default) or the Internet. Document ConventionsSeveral symbols are used throughout this documentation to add emphasis and to assist in relocating important information. The following table describes these symbols and their uses.
Document Customization - My_Notes
Beyond this DocumentThere is no substitute for experience and/or training, especially with respect to the real purpose for which you plan to use this equipment. We encourage you to explore options beyond the scope of these materials to expand your knowledge and skills necessary to support your applications. In addition to this documentation, VideoRay offers training and technical support and hosts a general user discussion forum and user image gallery. We also realize that collectively, users of our products spend considerably more time operating our systems than we do ourselves. Users also encounter more diverse operating environments across an extremely broad range of applications. We highly value this vast experience base, and invite and encourage you to share your experiences and suggestions with us. Please feel free to contact us by any of the methods listed below. Quality CommitmentVideoRay strives to design, manufacture, deliver and support the highest quality products and services, including this documentation. We have made every effort to ensure that this documentation is accurate and provides you with the most up-to-date information. If you find any errors in this documentation or have suggestions for improvements, each page contains a "Help us improve this document" feedback link in the left margin (you must be connected to the Internet to use this link).
DisclaimerThis document is deemed accurate at the time of its writing, however it is not a legal contract and the information contained herein should not be construed to represent any form of commitment. This document as well as the associated products and services are subject to change without notice. Alternate FormatsSingle HTML Page Format Portable / Printable Format HTML File Set |
Customize this Documentation - My_NotesMy_Notes are easy to incorporate directly into the pages of this manual. They can be used to clarify content, add additional information, or document your custom settings, operational tactics or procedures. My_Notes are page specific and display at the bottom of the desired page under the "My_Notes" heading. No programming is required - it is as simple as saving a file with your notes. Creating My_NotesMy_Notes can be written in HTML or plain text. HTML allows for more flexible formatting and inclusion of images or links to other web pages. To add a My_Note, create an HTML or text file containing the note and save it in the VideoRay\My_Notes\ folder, which can be found in the computer account user's documents folder (Documents\ for Windows 7, or My Documents\ for Windows XP). The file should be named the same as the page in which you want the note to appear, with a "my_" prefix (without the quotes). For example, if you want a My_Note to appear at the bottom of this page, the name of the file to create is: my_custom_my_notes.html. The name of the page being viewed can be found in the address bar of the browser being used to display this documentation.
Viewing My_NotesWhen you reload the page, your My_Note will appear - there is nothing else to install or configure. A sample My_Note file has been included to display the My_Note below. You can use this file as a model for creating your own My_Notes. Updating My_NotesTo update a My_Note, simply edit and re-save the My_Note file. Removing My_NotesMy_Notes can be removed by deleting or renaming the My_Note file. Sizing My_Notes Display (Optional)The default vertical size for My_Notes is set to 200 pixels, which is used for the sample My_Note below. Due to browser limitations, My-Notes do not size dynamically. This means that a long My_Note may display a scroll bar in order to view the whole My-Note. You can adjust the size to eliminate the need for the scroll bar. To set the size of a My_Note, you need to edit the file named "my_notes_size_table.js" in the My_Notes\ folder (location defined above). The file contains one line for each page of this document using the following format: window.page_name = size_in_pixels; Find the line for the page that includes the My_Note you want to resize and replace the value of size_in_pixels with the desired size in pixels. The page names are listed alphabetically. Example line from the "my_notes_size_table.js" file for this page: window.custom_my_notes = 200;
|
|
|
CoPilot RI
Operator's Manual, 2.00.00 |
How to Get HelpHelp for your CoPilot RI is available through several channels. All Hours Self-Service / Crowd-Source Tools
Global Support
Regional Support
Training
Operational Strategies and Tactics SupportIf you need help understanding how to apply your system to a specific project, contact VideoRay or you local VideoRay dealer. We can provide guidance or help you find a certified consultant. > |
Before Contacting SupportPlease make sure to consider the following information before contacting VideoRay's Technical Support to report a problem. The following information should available:
Once you have collected the recommended information, visit the "How to Get Help" page for contact information. In addition, please review VideoRay's Support website for additional information about:
|
|
|
CoPilot RI
Operator's Manual, 2.00.00 |
CoPilot RI Overview
|
|
|
CoPilot RI
Operator's Manual, 2.00.00 |
Quick Start InstructionsThese Quick Start Instructions are streamlined to cover just the essentials of operating your CoPilot RI system. They are provided to get you started as quickly as possible, while keeping you and the equipment safe. They cover the equipment set up and basic operation, but are not intended to result in a comprehensive base of knowledge or set of operational and piloting skills. The remaining sections of this documentation should be referenced for a complete understanding of the features, capabilities, operating procedures and maintenance requirements of your CoPilot RI system.
Topics in this Section |
Safety First
How Safe Is Safe Enough?Addressing all aspects of safety while working in a water environment is beyond the scope of this documentation. VideoRay encourages you to participate in safety training appropriate for your industry and applications, including such topics as vessel operations, first aid, survival and other relevant topics. |
Introduction to the System ComponentsUnpack the system and familiarize yourself with the components.
Additional ItemsAdditional items may be supplied with your system including tools, spare parts and other items. If included, these items are described in other sections of this documentation. Some items shown may be optional and not included with your configuration. |
Pre-Dive Preparations
The pre-dive preparations consist of three parts, a visual inspection before setting up the system, setting up the system including making connections, and power on tests of the system's safety circuits and primary functions. Conduct a Visual InspectionAssuming this is your first time using the VideoRay, everything should be in proper working order and ready to go, but it is good practice to perform a pre-dive inspection before every dive, even your first. If any problems are noticed, refer to the Diagnostics and Repair section of the Maintenance Guide and take appropriate corrective action, or contact VideoRay for assistance before commencing the dive.
Make the Connections
Most of the cables have been connected at the factory. See the appropriate sections of the Equipment Guide for detailed information about each of the connections. You will typically need to connect only the hand controller, tether and power cord.
Power On Tests
The VideoRay Pro 4 includes circuit safety component.
Testing the Circuit Safety ComponentsTest the GFCI / Circuit Breaker switch (The system must be connected to a working power source to perform this test.)
Set the Power switch to the On position. The green Power On indicator light should turn on. If the green Power On indicator light is not on, make sure the system is connected to a working power source and the GFCI / Circuit Breaker switch is turned on. Starting VideoRay Cockpit Control SoftwareMake sure the system is connected to a working power source and the GFCI / Circuit Breaker and Power switches are turned on.
Testing the System's FunctionsThe next step is to ensure that the essential features of the ROV are functioning properly. Use the hand controller to perform the following tests. See the Hand Controller section of the Equipment Guide for more information about using the hand controller.
Test the thrusters
Test the lights
Test the camera functions
Good AdviceThe time to catch small problems before they become big problems is during the pre-dive inspection. |
Dive OperationsAfter all of the pre-dive checks and tests have been completed successfully, you are almost ready to commence the dive. But, there is one more issue to address that could affect the performance of the ROV. The ROV is designed to be operated in a near neutrally buoyant configuration, so the last step before launching your VideoRay is to check the buoyancy. For most operations, the buoyancy is optimal when the top of the float block is even with the water surface and the ROV is level. If the ROV is to buoyant or heavy, the vertical position may be hard to maintain or control. Buoyancy Check and AdjustmentTo determine if the buoyancy is correct, lower the ROV and at least 3 meters (10 feet) of tether into the water. You can lower the ROV by the tether - it will not hurt the tether because there is Kevlar in it. Observe the ROV in the water - it should not be floating too high or sink. It should also be floating level and not tipped to one side or pitched up or down. If the ROV floats too high, you will need to add some ballast weights. If the ROV sinks, you will need to remove some ballast weights. If the ROV is not floating level, you can change the locations of the weights. The buoyancy can be adjusted by opening the skid pods and adding or removing the supplied ballast weights. To open the skid pods, turn the ROV upside down. Unhook the retaining o-ring on the end of the pod, and lift up on the pod. The weights can be added to or removed from the slots by hand. For most operations, the weights should be evenly distributed.
Commence the DiveOnce the buoyancy has been adjusted the ROV is ready to launch. Lower it into the water and operate the controls to maneuver it.
For your first dives, practice until you are comfortable operating the controls without looking at them and you are able to control the ROV with some precision.
Practice Makes PerfectDeveloping the skills to operate your CoPilot RI like an expert may take some time. Practicing on a regular basis is highly recommended. |
Post-Dive OperationsAt the conclusion of your dive, retrieve the VideoRay and power down the system by closing VideoRay Cockpit, shutting down the computer and turning off the Power switch. Make sure the ROV is secure before disconnecting the tether. After disconnecting the tether, keep the tether connectors clean and do not let them drag on the ground. Proper maintenance of your VideoRay system ensures a long service life and that it will be ready to operate when you are. After each dive, you should visually inspect the system for damage that might have occurred during your operation. VideoRay Cockpit includes an online interactive Post Dive checklist. See the Post Dive Checklist section of the VideoRay Cockpit Guide
DebriefingCongratulations! You are well on your way to becoming an accomplished micro-ROV operator, but there are still many things to learn and skills to master. Continue learning about the system by reviewing the additional sections of this documentation and, most importantly, practice, practice, practice. If you encountered any difficulties or have any questions, review these Quick Start Instructions and the other documentation that came with your system, including the Equipment Guide and Maintenance Manual. If you still have difficulty or questions, contact VideoRay. Your success is our success, and we are here to help you get the most out of your VideoRay.
Ready to Learn More?To accelerate your learning and receive recognition for your knowledge and skills, VideoRay offers in-person classes and online training as well as the Micro-ROV User Certificate program. Training can be delivered at your site and customized to your needs. To learn more about these opportunities, click on the training link above to visit the VideoRay Educational Resources website. |
Glossary / Index |
FAQ (Frequently Asked Questions)
More Questions?Additional questions and answers are available online at www.rovfaq.com, which is also linked at the bottom of each page. The online FAQ is updated regularly. |
|
|
CoPilot RI
Operator's Manual, 2.00.00 |
Requirements |
Specifications
Product NewsSee www.videoray.com for the most up-to-date product information. |
|
|
CoPilot RI
Operator's Manual, 2.00.00 |
Equipment GuideVideoRay CoPilot RI requires that the Pro 4 ROV is equipped with a Doppler Velocity Log (DVL) an ROV GPS Antenna and a BlueView P900 Sonar. These components are described in more detail in the following sections. |
ROV SystemThe base system for a CoPilot RI configuration includes the VideoRay Pro 4. For more information about the VideoRay Pro 4, see the VideoRay Pro 4 Operator's Manual. |
SonarForward looking imaging sonar provides extended visual range capabilities. Possible targets of interest can be observed and marked, and the system can navigate to them manually or automatically. |
DVLThe DVL is used to keep track of the vehicle's location while it is underwater. It uses an array of acoustic beams to track its course over the seafloor in a local coordinate system. |
GPSThe ROV GPS Antenna provides a method to identify the vehicle's location within a global reference frame. GPS is not effective underwater, so the GPS Antenna only works when the ROV is on the surface. Periodic GPS fixes can supplement the DVL tracking. |
|
|
CoPilot RI
Operator's Manual, 2.00.00 |
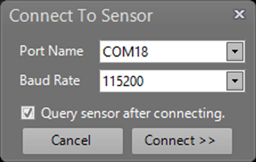
Software GuideProgram Start-up ProcedureCoPilot RI software requires that VideoRay Cockpit be operating. For more information about the Pro 4 and VideoRay Cockpit, see the Pro 4 Operator's Manual. To access the Copilot RI operating environment, make sure VideoRay Cockpit is running and the ROV is operating, then click on the CoPilot button on the VideoRay Cockpit control bar.
This will start a Virtual Machine, which will appear on the second monitor by default. On the "desktop" of the virtual machine, there is a program icon for the CoPilot RI program. Double click the CoPilot RI icon (or right-click and select "Open") to start CoPilot RI. Interface OverviewThe VideoRay CoPilot RI interface presents the user with an overview of the ROV's status and its position in the navigation chart. The overall look of the pilot interface is designed to be easy to read and intuitive to use.
The VideoRay CoPilot RI interface consists of the following sections:
Each of these sections are described in more detail in the following pages. |
Navigation Chart DisplayThe navigation chart display is the main panel in the pilot interface. It allows the user to monitor the position of the ROV in real-time. It is also possible to use the navigation chart display to generate pilot commands for the ROV by selecting coordinate locations with a mouse when in an Auto Fly mode. For example, when in AUTO FLY Click and Go mode, a left-button mouse click in this display generates a new position request for the ROV, and a right-button mouse click generates a new heading request. The background of the Navigation Chart Display can be either a grid or a chart. A sonar image overlay can also be displayed for target recognition and location determination.
The navigation chart displays a plan view of the ROV and the surrounding area. The ROV position is calculated by VideoRay RI CoPilot's navigation system - the accuracy of which depends on the frequency and quality of the absolute navigation fixes. The display is always centered on the ROV, so it will appear as if the grid or chart is moving under the ROV. By default, magnetic north is up on the screen. The ROV will rotate in the center of the screen to reflect the current ROV heading. Other viewing modes are available, see the view orientation section of the Operations Support Tools for more information. The ROV is represented by a blue rectangle with a line projecting in the direction the ROV heading. Other general interface elements include:
The navigation chart display is also responsible for displaying heads-up messages and auto flight indicators. The auto flight indicators can help the operator understand what the system is doing.
Navigation Chart Display Zoom Scale Control
The navigation chart display zoom scale allows the user to change the viewable area and displayed size of objects. The scale of the viewable area is measured from the center of the view to the right or left edge of the viewable area. The scales are set to pre-defined values of 2m, up to 50,000m (or their equivalent values in feet). |
Water Column Display
|
Flight Status PanelThe Flight Status Panel is displayed in the upper left of the interface. It provides real time information about the position and movement of the ROV.
The flight status panel provides the user with the following ROV information:
This information is normally updated from the navigation system, but if the DP is in standby only the raw ROV information is displayed. No values are displayed if no ROV information is detected. |
Flight Controls PanelThe Flight Controls Panel is used to select the flight mode and indicate which flight mode is active. It is also used to select the desired speed of the ROV while operating in an auto flight mode.
Selecting a flight mode button changes the flight mode and the active button is displayed in yellow with a cyan outline. Likewise, selecting a speed button changes the speed at which the ROV will operate when operating in an auto flight mode. The selected speed is displayed in yellow with a cyan outline. Flight Modes include:
Speeds include:
|
MANUAL Mode
In Manual Mode, the pilot is in full control of the ROV. CoPilot will not make any attempt to control the ROV's behavior. |
Stay Command
The Stay Command can be used to interrupt an auto flight mode and stop the ROV. After the Stay button is pressed, the system will engage Auto Fly mode with the ROV holding station according to the user preferences setting for Enable Station Keeping.
|
Velocity Controls
The velocity controls allow the user to select the desired speed of the ROV while in an auto flight mode. The speeds are defined as slow (0.125 m/s), medium (0.25 m/s) and fast (0.5 m/s). While in an auto flight mode, the speed can be reduced at any time, but the speed cannot be increased without first reverting to manual mode.
|
AUTO HOVER Mode
In Auto Hover mode, CoPilot will attempt to maintain the ROV's current position, depth (or altitude) and heading within a set tolerance about its current position. The user can use the joystick to override Auto Hover mode for horizontal and/or vertical control of the ROV. If there are no joystick navigation control inputs, the "In Position" status indicator will turn green and CoPilot will attempt to control the ROV according to the setting of the Enable Station Keeping selection in User Preferences.
To exit Auto Hover mode, select another Auto Fly Mode, Manual mode, or press the Stay command. Pressing the Stay command will cause the system to enter Auto Fly mode.
|
AUTO FLY Mode
Auto Fly will attempt to navigate the ROV to a desired location or series of locations specified by the user. There are several Auto Fly modes. After selecting Auto Fly, the user selects the Auto Fly sub mode.
These modes are described in the following sections. |
AUTO FLY - Click and Go
In AUTO FLY Click and Go mode, CoPilot will attempt to control the ROV's motion according to mouse inputs in the Navigation Chart area. A left-button mouse click changes the objective location for the ROV to the coordinates where the click occurred, and CoPilot will navigate the ROV to that location at the speed specified by the Velocity Controls selection. A right-button mouse click in the Navigation Chart area will cause CoPilot to change the ROV's heading to the bearing from its current position to where the click occurred. The ROV's depth (or altitude) can be controlled by a mouse click in the Water Column display area. When AUTO FLY Click and Go is initiated, the ROV's objective location, heading and depth (or altitude) are initially defined as its current location. When an objective location has been defined be a left mouse click, it is represented by a red cross. A red line is displayed from the point at which Click and Go was activated to the objective location. A green trajectory line is drawn between the current ROV position and the objective location and this line is updated as the ROV approaches the objective location. When an objective heading has been defined be a right mouse click, it is displayed by a yellow line of fixed length from the current ROV position and oriented at the requested objective heading. The objective heading is also displayed as a number at the end of the objective heading line. Once the objective location or heading is achieved, the "In Position" status indicator will turn green and CoPilot will attempt to control the ROV according to the setting of the Enable Station Keeping selection in User Preferences.
The user can use the joystick to override AUTO FLY Click and Go mode for horizontal control of the ROV. Depth cannot be overridden. If manual override is performed, the objective location will become to location of the ROV when the pilot releases the joystick. To stop the ROV while under CoPilot control, press the Stay command button. Pressing the Stay command will cause the system to enter Auto Fly mode. To exit Auto Fly Click and Go mode, select another Auto Fly mode or Manual mode.
|
AUTO FLY - Go to Waypoint
In AUTOFLY Go to Waypoint mode, CoPilot will attempt to control the ROV's motion according to keyed in values entered by the operator. Once the objective location is entered, CoPilot will navigate the ROV to that location at the speed specified by the Velocity Controls selection. There are three types of Waypoints:
Once the Waypoint is achieved, the "In Position" status indicator will turn green and CoPilot will attempt to control the ROV according to the setting of the Enable Station Keeping selection in User Preferences.
The user cannot use the joystick to override Auto Fly Go to Waypoint mode for horizontal or vertical control of the ROV. To stop the ROV while under CoPilot control, press the Stay command button. Pressing the Stay command will cause the system to enter Auto Fly mode. To exit Auto Fly Go to Waypoint mode, select another Auto Fly mode or Manual mode.
|
AUTO FLY - Survey Plan
In AUTOFLY Survey Plan mode, CoPilot will attempt to control the ROV's motion according to a series of survey waypoints entered using mouse clicks or keyed into a table. Once a survey is started, CoPilot will navigate the ROV through the series of survey waypoints at the speed specified by the Velocity Controls selection.
Survey controls include:
Once a survey waypoint is achieved, the "In Position" status indicator will turn green and CoPilot will attempt to control the ROV according to the setting of the Enable Station Keeping selection in User Preferences.
The user cannot use the joystick to override Auto Fly Survey Plan mode for horizontal or vertical control of the ROV. To stop the ROV while under CoPilot control, press the Pause or Stop button in the survey controls panel or Stay command button in the Pilot Controls Panel. Pressing the Stay command will cause the system to enter Auto Fly mode. To exit Auto Fly Survey Plan mode, select another Auto Fly mode or Manual mode.
|
CRUISE Mode
In Cruise mode, CoPilot will attempt to maintain the ROV's speed and heading. Once selected, Cruise will cause the ROV to begin navigating at the selected speed and current heading. The user can issue right clicks on the Nav Chart to specify a new heading. The user can issue left clicks in the Water Depth chart to change the ROV's objective depth (or altitude). The user cannot use the joystick to override Auto Hover mode for horizontal and/or vertical control of the ROV. In Position does not apply to Cruise mode. To exit Auto Hover mode, select another Auto Fly Mode, Manual mode, or press the Stay command. Pressing the Stay command will cause the system to enter Auto Fly mode.
|
Markers PanelVideoRay RI CoPilot allows the user to place markers onto the navigation chart area of the pilot interface to denote positions of interest. These markers can be placed automatically at the vehicles current position, manually with a CTRL Left mouse click or at a keyed in location specified by the operator. Markers can be saved and reloaded by the operator.
Markers Interface Placing a Marker at the Current PositionThe user can place a marker at the vehicles current position, which will be visually denoted by a yellow dot on the Pilot Interface, by clicking the Place Marker Icon. A marker entry will be added to the markers list in the markers panel.
Place Marker Icon Manually Placing a MarkerThe user can manually place a marker by selecting the Manually Place Marker icon:
Manually Place Marker The user will then be instructed to enter the coordinates of their chosen location into the window. Once entered, the user should click "save" to place the marker. If incorrect coordinates have been entered, a warning message will alert the user of this, and correct coordinates should be entered before saving. A marker entry will be added to the markers list in the markers panel.
Entering the Coordinates of a Marker Fly to MarkerOnce a marker has been placed, the user, at any time during their mission, can instruct the vehicle to fly to the Marker by clicking on the chosen marker(s) within the Markers Interface, and then selecting the Fly to Marker Icon.
Fly to Marker Save Marker PositionsThe user has the option of saving the position of their current marker(s) for use at a later date. To do this, the Save icon should be selected. Once clicked, the file will automatically be saved to the data folder.
Save Marker Positions Load a Marker FileTo load a previously saved Marker File, the user must select the Load icon.
Loading a Marker File By selecting the appropriate file from its location and selecting "open", the saved markers will be loaded onto the current Pilot Interface.
Selecting a File Editing MarkersTo change the location of a specific marker, there are two possible actions that can be undertaken:
Deleting a MarkerTo delete a marker, there are two possible actions that can be undertaken:
Your chosen marker will now be deleted. Selecting Multiple Markers for DeletionTo select multiple markers from the Markers Interface list of Markers, the user should, whilst holding the Ctrl key on their keyboard, select the markers they wish to delete by clicking on each marker. Deletion can continue as described previously. |
Status Indicators and AlarmsStatus indicators and alarms provide the operator with feedback on the system's status and operational state. In general, status indicators provide operational feedback, and alarms indicate a hardware problem. The following status indicators are provided:
The following Alarms are illuminated when the corresponding device or system is not working properly:
|
Operations Support ToolsThere are further interface options available to users. These options can be found to the top center, above the pilot interface, and right, above the waterfall, of the interface toolbar. These additional functions include:
|
GPS ControlsGPS Toggle
|
Recording ControlsRecord Video Toggle
Screen Shot / Snapshot
|
Chart ControlsLoad Chart
|
View ControlsErase Breadcrumb Trail
Set Grid Orientation
Grid Settings
|
Sonar ControlsSonar Toggle
Auto Intensity Toggle
Color Map Selection
Threshold / Intensity Sliders
|
User PreferencesOpen User Preferences
|
Units
|
Joystick Calibration
|
Features
|
Vehicle
|
VideoRay Cockpit IntegrationVideoRay CoPilot operates in conjunction with VideoRay Cockpit. There are several key areas of integration, including: |
OverrideIn order for VideoRay CoPilot RI to communicate with VideoRay Cockpit, Cockpit operates in override mode. This allows CoPilot RI to send piloting commands to the ROV through Cockpit. If the system becomes unstable while in an auto flight mode, the Override can be used to break this connection and return manual control to the pilot. |
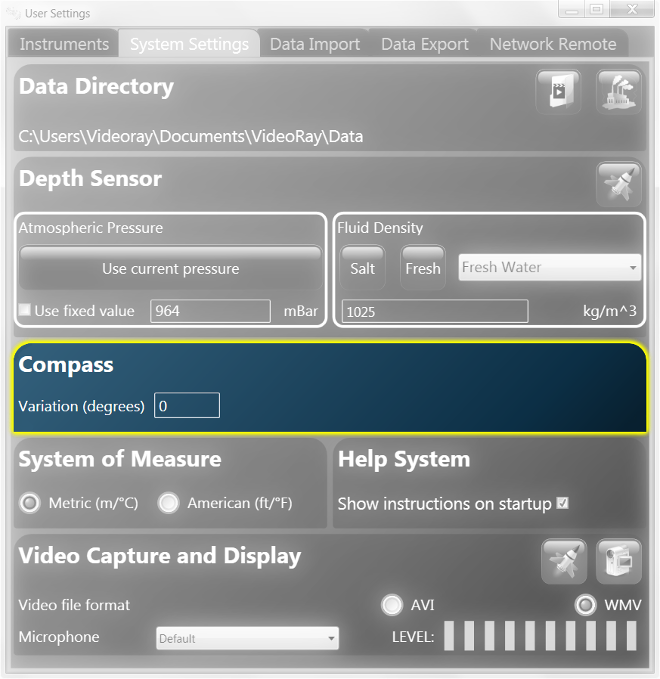
Compass DeclinationFor best results with VideoRay CoPilot RI, the local magnetic declination must be set in VideoRay Cockpit. The remainder of this page is an expert from the Pro 4 Operator's Manual. For more information and context, see the Pro 4 Operator's Manual. Compass
The ROV compass system is designed to display headings relative to Magnetic North. You can enter a local compass variation to account for magnetic declination. The declination is considered positive when the Magnetic North is East of True North. The value you enter is numerically added to the heading from the ROV. For example, if you are in an area with a declination of 15 degrees West, the ROV heading will read +15 degrees when the ROV is facing True North (assuming no variation has been entered). You should therefore enter -15 for the variation, which would result in a correct True North reading of 0 when the ROV is pointed True North.
|
Compass CalibrationFor best results with VideoRay CoPilot RI, the compass calibration should be completed to optimize its performance in your location. If you have moved 1 degree of Latitude or more from your last operating location or if you are operating near a large ferrous object like a ship, you should calibrate the compass. The compass calibration can be found in VideoRay Cockpit. The remainder of this page is an expert from the Pro 4 Operator's Manual. For more information and context, see the Pro 4 Operator's Manual. Compass Calibration - Vector NavTo calibrate the Vector Nav compass, follow these steps:
|
ROV GPS FilterFor best results with VideoRay CoPilot RI, the GPS Filter should be tuned to optimize its performance in your local conditions. The GPS filter can be found in VideoRay Cockpit. The remainder of this page is an expert from the Pro 4 Operator's Manual. For more information and context, see the Pro 4 Operator's Manual. ROV GPS InstrumentThe ROV GPS instrument provides ROV location, status and filter settings for the ROV GPS.
Display
UseThe ROV GPS instrument will display the current location and status of the ROV GPS. It also has the ability to set filter criteria that control whether the GPS information is passed from VideoRay Cockpit to other applications. PositionThe Latitude and Longitude of the GPS fix is displayed in the top center of the instrument. Status
The number of satellites being observed is indicated by blue indicator lights. FiltersFilters allow for better operational performance by eliminating GPS fixes that are based on poor data and have a greater degree of uncertainty. These filters can suppress apparent jumps in the reported location due to such erroneous data. Each filter is defined by a slider that represents a cutoff threshold. The cutoff threshold is set by moving the slider left or right on a scale. The value of the cutoff threshold is displayed as a tool tip when the mouse is hovered over the slider. The value of the data being received is displayed as a bar on a scale. If the value is good, the bar is green. If the value does not meet the cutoff threshold, the bar is red. Filter Settings
Toggle Filter - Toggle filter allows the filter to be turned on or off. If the filter is On, only those signals that meet all filter criteria are passed. If the filter is Off, GPS information is always passed.
|
Software ManagementManaging VideoRay CoPilot software is not as complex as it sounds. Management topics include:
|
Software Installation
Step-by-step Instructions
|
Software UpdatesFor most CoPilot RI installations, it is best to remove previous versions of VideoRay Cockpit and CoPilot RI prior to installation of an update. Once the previous versions have been removed, follow the procedures for a new software installation. |
Folder StructureAll CoPilot RI data is saved to a common data folder structure.
|





































.png)
.png)
.png)