Compass Calibration
For the best navigation performance, the compass should be calibrated in the following situations:
- When the system is first received if the compass does not appear to be accurate.
- When using the system in a remote location where it has not been used before if the compass does not appear to be accurate.
- Whenever the compass does not appear to be accurate.
 The compass will be affected by iron or magnetic sources, such as ship's hulls or sheet piling or other natural deposits. Calibrating the compass will not correct for these anomalies. The compass will be affected by iron or magnetic sources, such as ship's hulls or sheet piling or other natural deposits. Calibrating the compass will not correct for these anomalies.
Step-by-Step Procedures
Magnetic Field Mapper software must be installed on the Operator Control Console. If the Magnetic Field Mapper software is not installed, It can be downloaded at: https://videoray.exavault.com/files/quarterdeck/xsens/mag_mapper.tgz. The user name is quarterdeck and the password is quarterdeck (use all lower case). After logging in, navigate to the xsens/ folder and download mag_mapper.tgz.
The AHRS firmware must be updated to attitude_sensor-1.4.4.hex or higher. If the firmware is not up-to-date, see: Command: vr_refresh and its following page for more information about updating the firmware.
- Connect the system as normal and power on Operator Control Console and the ROV.
- If EOD Workspace has been started since turning on the Operator Control Console.
- Open a terminal window.
- Enter the following command: killall_vr.sh
- Press the Enter key.
- Close the terminal window.
- Unplug all USB devices from the Operator Control Console, except the keyboard / mouse.
- Make sure vehicle has been powered on for at least 10 seconds.
- Move the vehicle to a magnetically "clean" area at least 20 feet from any car or truck, not near concrete (which may contain rebar), away from steel structures etc.
The ROV must be separated as far as possible from iron or magnetic sources during the calibration process for best results.
- Start the Magnetic Field Mapper software by double clicking on the Magnetic Field Mapper icon on the desktop.
- When asked if you trust this application and want to Launch it, click on the Yes button.
- When asked for the password, enter videoray and click on the Authenticate button (use all lower case).
- When the Magnetic Field Mapper software starts, make sure the Use Motion Tracker option selected and click on the Next and then the Scan buttons.
- Wait up to 30 seconds for the Magnetic Field Mapper software to find the AHRS Module. If the software reports that it does not find any devices, close the software and restart it and repeat these steps.
- When the Magnetic Field Mapper software finds the AHRS, which will be listed by a unique ID number, ensure the checkbox in front of the number is checked and click on the Next button.
- The Capturing Data screen will appear with a graphic display of three axes and a sphere.
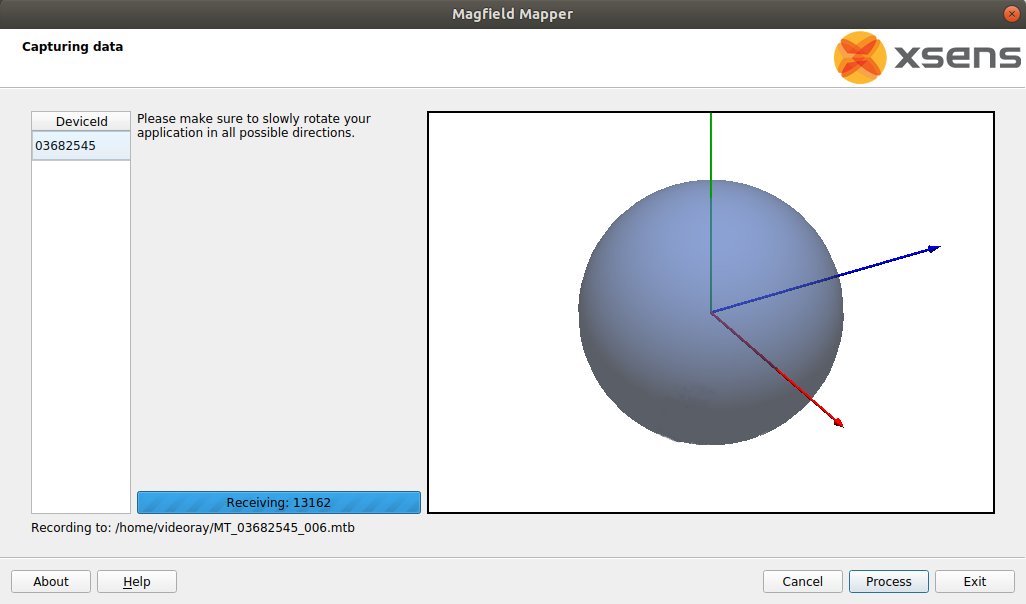
- The vehicle must be rotated slowly 360 degrees about all axes. As you rotate, the sphere will update with areas that are mapped. The goal is to cover as much of the sphere as possible.
- Start by holding the ROV flat and spin around in a circle to rotate about the ROV's vertical axis.
- Hold the ROV upside down and spin around in a circle to rotate about the ROV's inverted vertical axis.
- Hold the ROV with its port (left) side up and spin around in a circle to rotate about the ROV's pitch axis.
- Hold the ROV with its starboard (right) side up and spin around in a circle to rotate about the ROV's inverted pitch axis.
- Hold the ROV nose up and spin around in a circle to rotate about the ROV's roll axis.
- Hold the ROV nose down and spin around in a circle to rotate about the ROV's inverted roll axis.
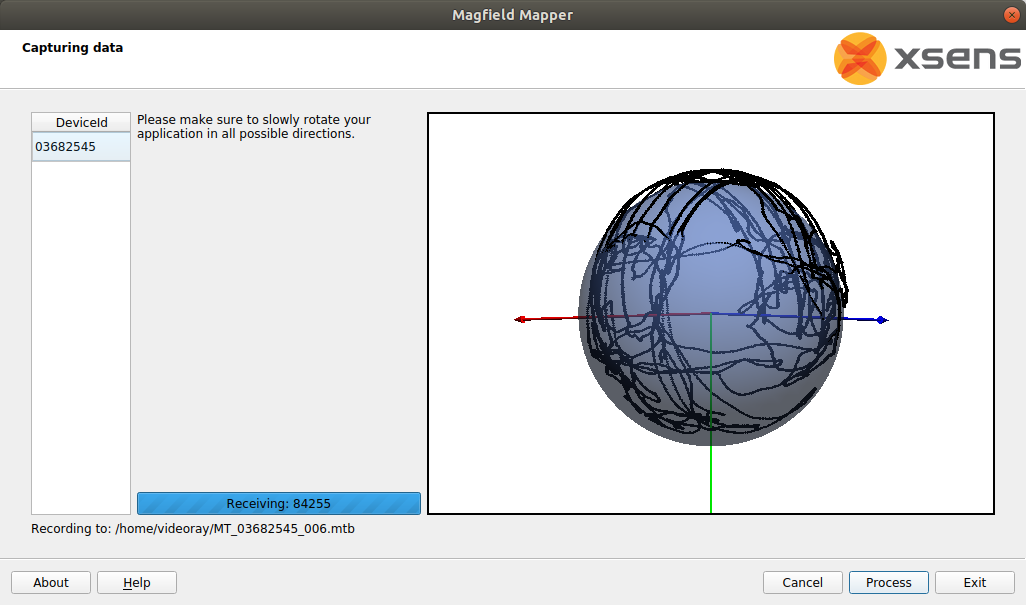
- The sphere should show six circles, one on each side roughly centered about each axis.
- Repeat the above steps, but angle the ROV 45 degrees relative to two axes in each case. An example would be holding the ROV flat, and then tipping the front down 45 degrees and at the same time the left down 45 degrees for the rotation.
- This should result in additional circles which should more completely cover the sphere. The sphere does not have to be completely covered, but there should not be any large gaps in the coverage.
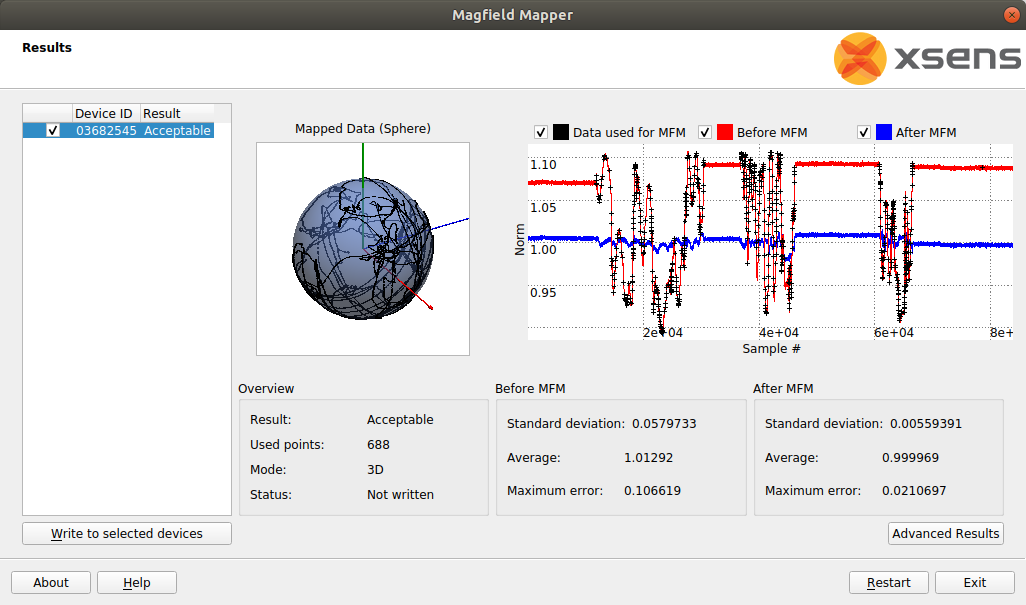
- After completing the rotations to cover as much of the sphere as possible click on the Process button.
- The display will update with a before (red) and after (blue) graph. The red graph will likely have sections with a lot of variation and be offset from 1.0. The blue graph should have much less variation and average value close to 1.0.
- Click the Write to selected devices button.
- Click the Exit button to close the Magnetic Field Mapper software.
- Turn off the ROV power, wait 10 seconds and then turn the ROV power on again.
- The compass calibration is complete and the ROV is ready to use.
|



