|
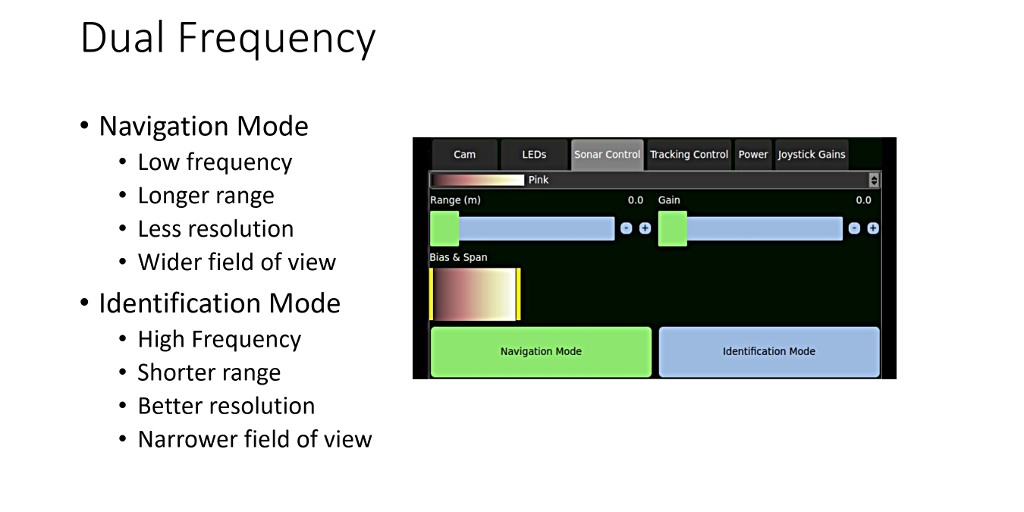
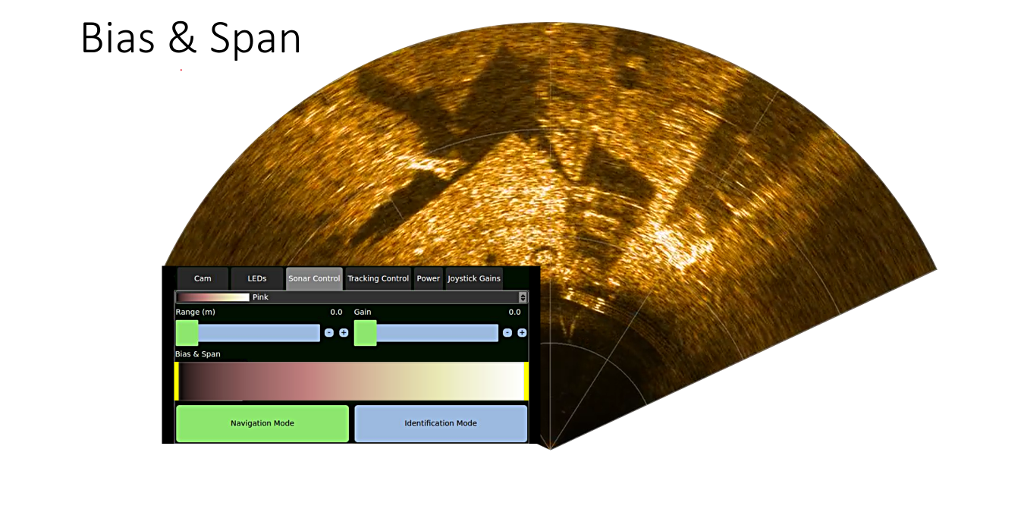
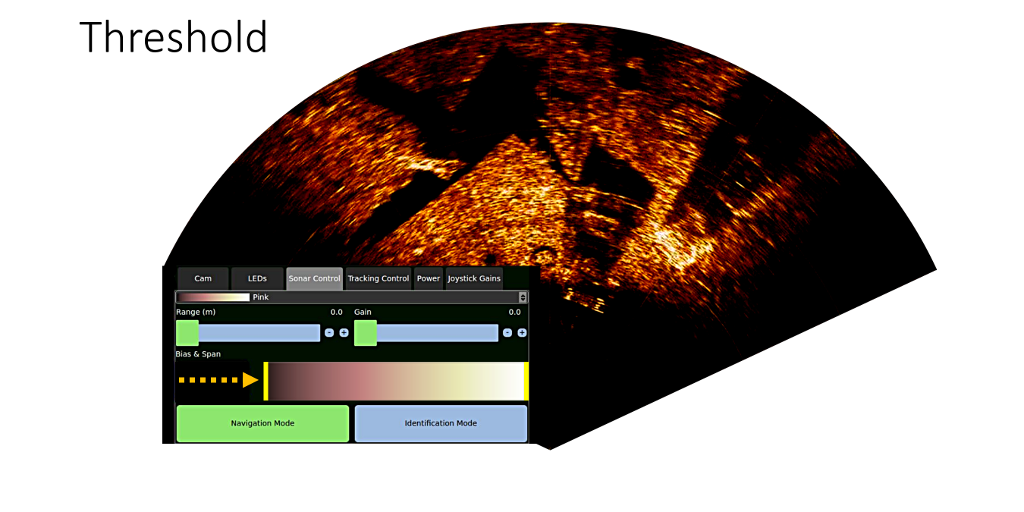
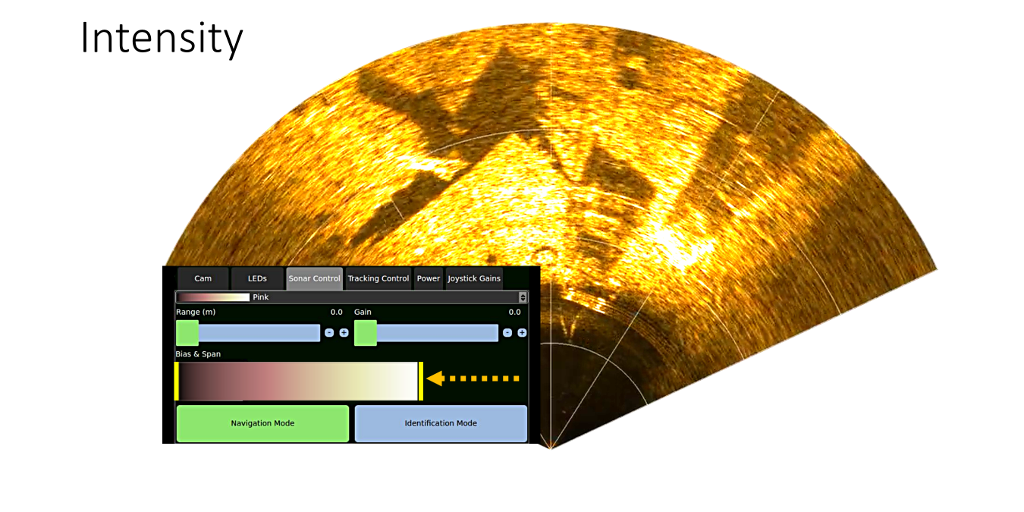
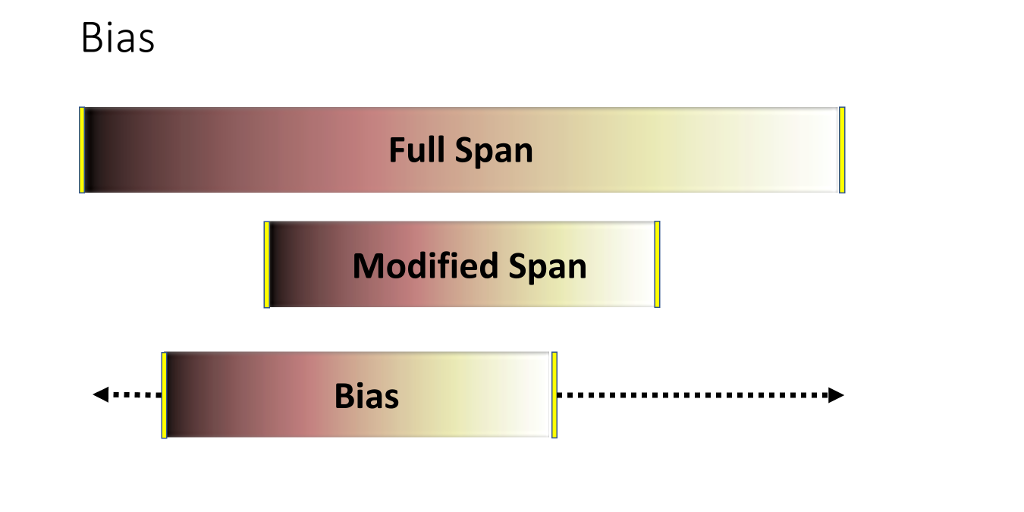
The Mode, Color Palette, Range, Gain, Bias and Span represent the first level of options for adjusting the sonar image quality. We will look at some advanced level settings at the end of this lesson.
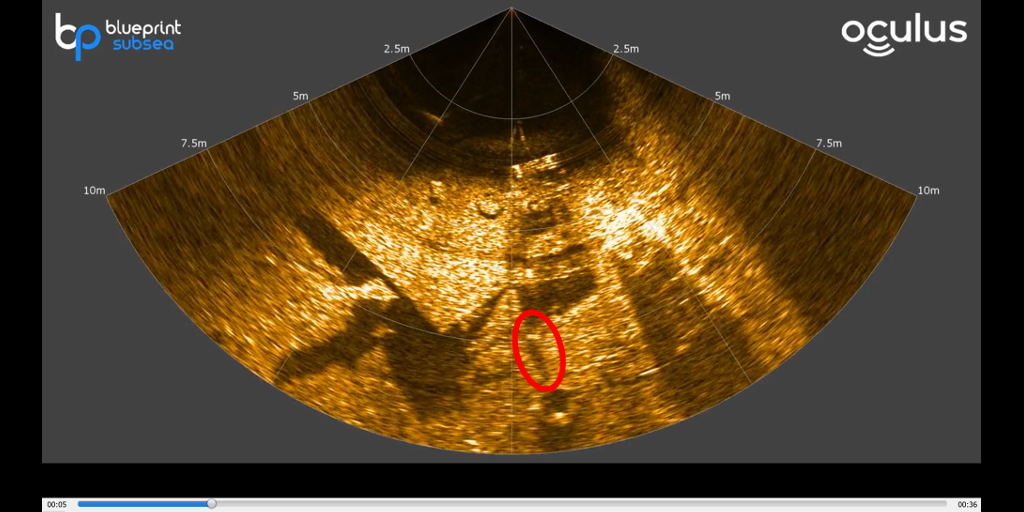
Before we do that, let's turn our attention for the moment to the physical characteristics that make a scene something that will display well or poorly. Unfortunately, you won't always be working in an area with low clutter and good targets.
The following characteristics play an important role in determining what an object's sonar signature looks like. Some objects are just better than others and realizing this can help set expectations for what the best images, in any given situation, should look like. Note that the final result, is a combination of all of these, so considering one factor alone is not sufficient to decide something will make a good sonar target.
Shape - Flat surfaces are generally better than curved ones.
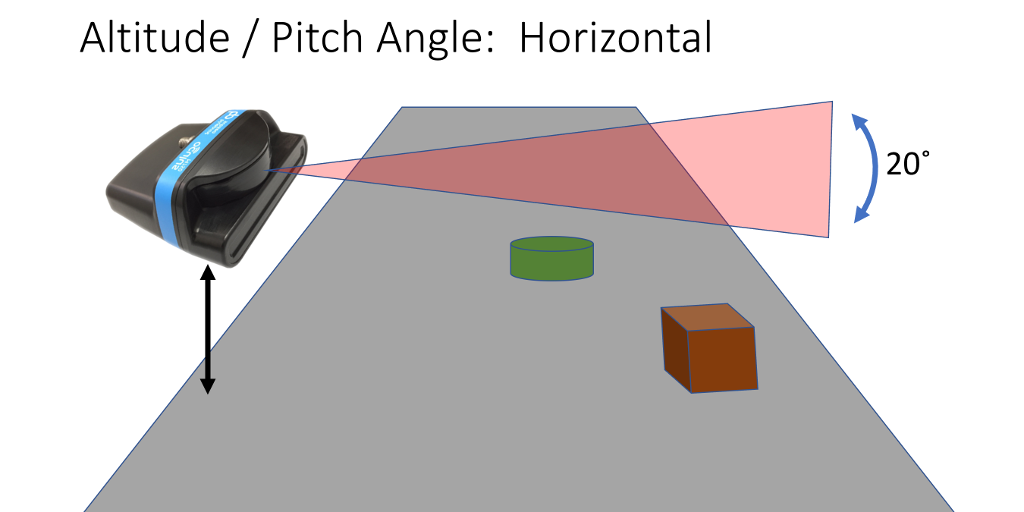
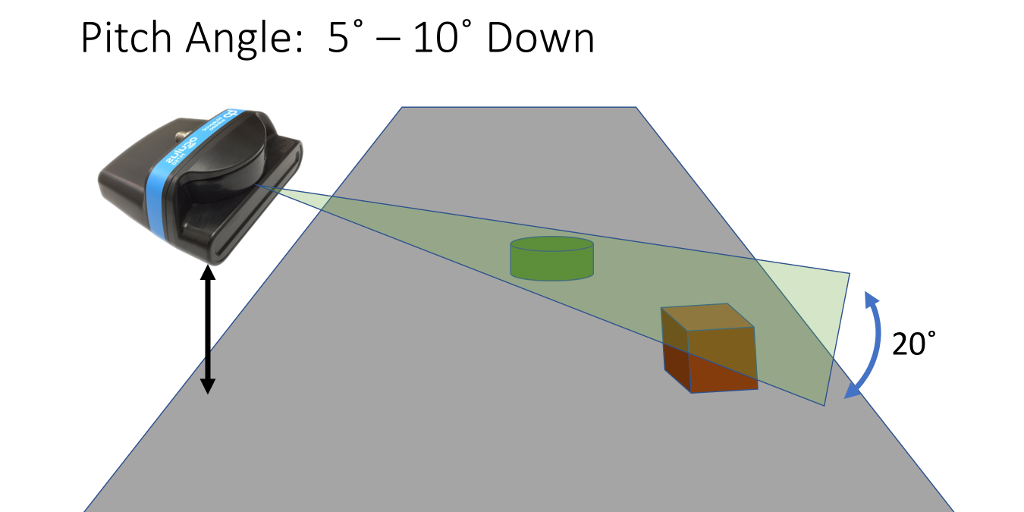
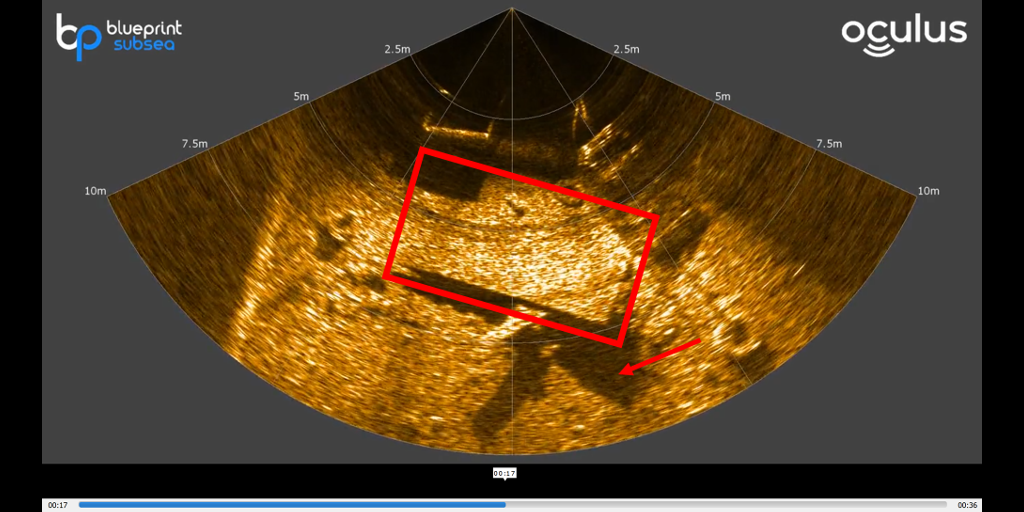
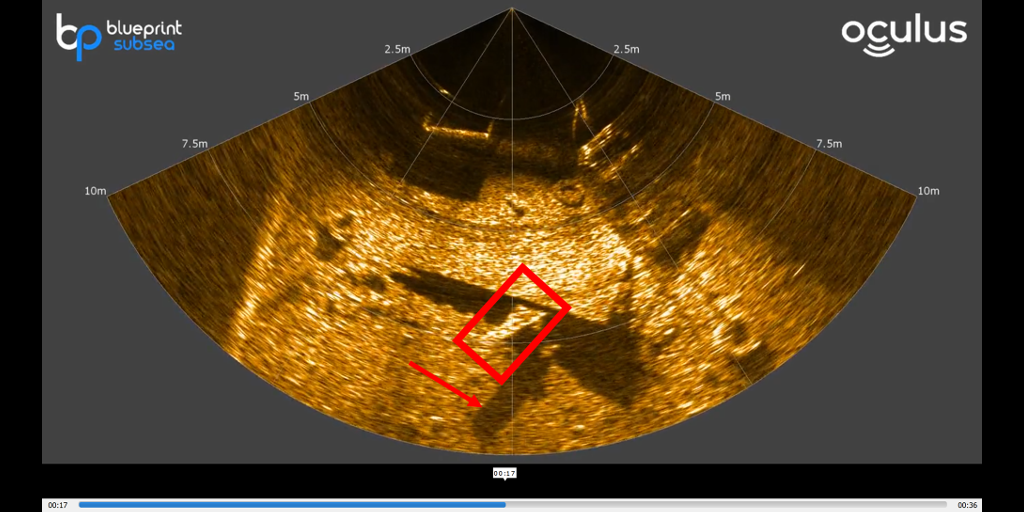
Angle – objects perpendicular to the sonar are generally better than those at oblique angles. If the angle is oblique enough, the reflection can be away from the sonar and an object the you might expect to see clearly, can actually look dark, like a shadow.
Texture - Rough versus smooth can be interesting. Some rough surfaces can act like a multifaceted reflector and appear very bright. Smooth surfaces at the "right" angle can likewise be bright. This phenomenon is generally highly related to the other characteristics.
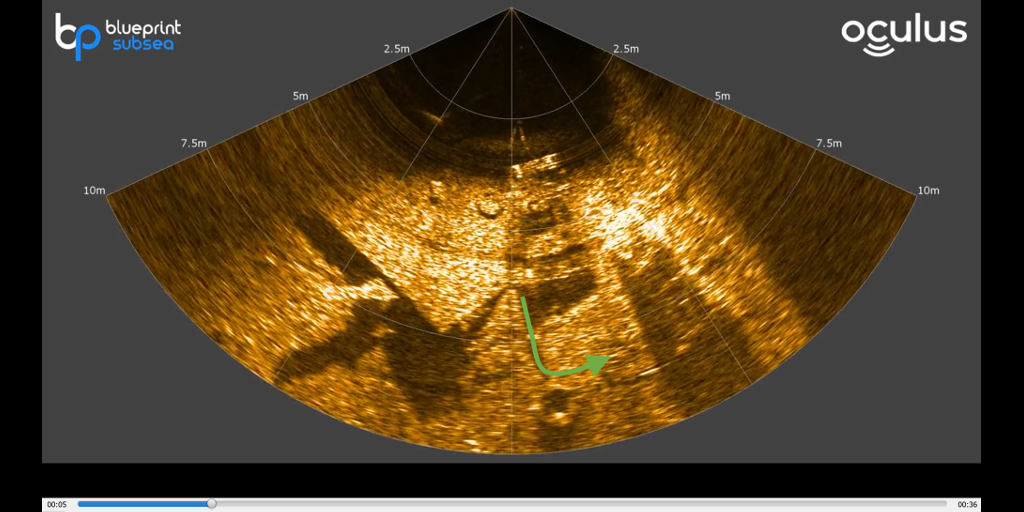
Size - Bigger targets will generally appear better than smaller targets. If small enough, the sonar resolution might not be able to detect or display the object at all.
Distance - The closer to the target, the less attenuation and thus, better the image. But, as mentioned, too much gain can wash out the details of a close target.
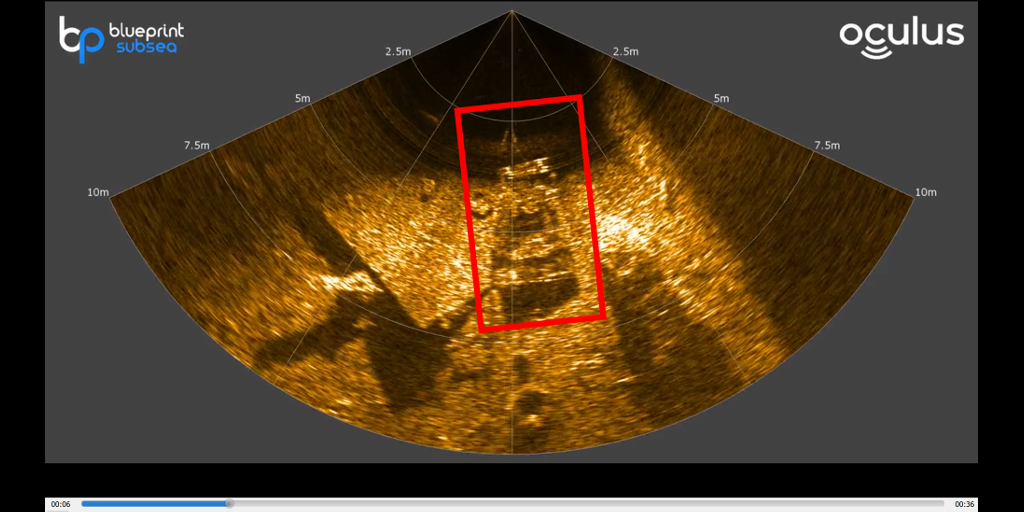
Object Density relative to water - Reflections occur at the interface of an object and the water. Objects with similar densities, generally produce weaker echoes than objects that have markedly different densities. Another similar effect can be seen with hollow versus solid objects. An empty steel drum will produce a much better echo than a solid steel cylinder of the same size.
|