Pro 4 SeaTrac USBL
Standard Operating Procedures


This manual can be found at: https:download.videoray.com/documentation/sop_usbl_seatrac_pro_4
This manual can be found at: https:download.videoray.com/documentation/sop_usbl_seatrac_pro_4
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
Copyright NoticeThis material is copyright protected. No material may be reproduced or transmitted in any form or by any means for any purpose without expressed written consent of VideoRay LLC. Copyright © 2022, VideoRay LLC - The Global Leader in Micro-ROV Technology Cover image Copyright © 2021, Blueprint Subsea |
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
Table of Contents
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
About this DocumentOnline ManualThis printed Quick Start Guide is a subset of the full version of this manual, which is available on the Pro 4 SeaTrac USBL control panel and online in the following formats:
Document ConventionsSeveral symbols are used throughout this documentation to add emphasis and to assist in relocating important information. The following table describes these symbols and their uses.
Beyond this DocumentThere is no substitute for experience and/or training, especially with respect to the real purpose for which you plan to use this equipment. We encourage you to explore options beyond the scope of these materials to expand your knowledge and skills necessary to support your applications. In addition to this documentation, VideoRay offers training and technical support and hosts a general user discussion forum and user image gallery. We also realize that collectively, users of our products spend considerably more time operating our systems than we do ourselves. Users also encounter more diverse operating environments across an extremely broad range of applications. We highly value this vast experience base, and invite and encourage you to share your experiences and suggestions with us. Please feel free to contact us by any of the methods listed below. Quality CommitmentVideoRay strives to design, manufacture, deliver and support the highest quality products and services, including this documentation. We have made every effort to ensure that this documentation is accurate and provides you with the most up-to-date information. If you find any errors in this documentation or have suggestions for improvements, each page contains a "Help us improve this document" feedback link in the left margin (you must be connected to the Internet to use this link).
DisclaimerThis document is deemed accurate at the time of its writing, however it is not a legal contract and the information contained herein should not be construed to represent any form of commitment. This document as well as the associated products and services are subject to change without notice. |
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
How to Get HelpHelp for your Pro 4 SeaTrac USBL is available through several channels. All Hours Self-Service / Crowd-Source Tools
Global Support
Regional Support
Training
Operational Strategies and Tactics SupportIf you need help understanding how to apply your system to a specific project, contact VideoRay or you local VideoRay dealer. We can provide guidance or help you find a certified consultant. > |
Before Contacting SupportPlease make sure to consider the following information before contacting VideoRay's Technical Support to report a problem. The following information should available:
Once you have collected the recommended information, visit the "How to Get Help" page for contact information. In addition, please review VideoRay's Support website for additional information about:
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
USBL Systems OverviewThe Blueprint Subsea SeaTrac USBL acoustic positioning system allows users to track the location of VideoRay ROVs. The USBL system includes a topside beacon and an ROV beacon. The topside beacon initiates the tracking process by transmitting an acoustic ping. The ROV beacon responds, and the time from the initial ping until the response is used to calculate the distance of the ROV from the topside beacon. The topside beacon has several receivers and uses these to determine the bearing of the ROV with reference to an index heading. This information can be used to ascertain the location of the ROV relative to the topside beacon. When coupled with a GPS receiver to determine the location of the topside beacon, the geolocation of the ROV can be determined as well. Usually, the GPS receiver and the topside beacon are not in the same location, and the offset between the two must be known to compute the geolocation of the ROV. The SeaTrac USBL system requires that offsets and other parameters be set properly to ensure accurate position tracking. This Standard Operating Procedures Guide describes the step-by-step procedures required to properly set up the system, enter required parameter data, and operate the tracking mode. This Standard Operating Procedures Guide is supplemental to basic product information provided by Blueprint Subsea. See Blueprint Subsea's SeaTrac website and manuals for additional information. The SeaTrac manuals are installed with the software and should also be accessible on the host computer.This guide is written for using the USBL system with the PinPoint software. For use with a Mission Specialist system with Greensea Workspace software, see the Greensea Workspace manual, and the Pro 4 vs Mission Specialist Use in the Appendices. |
Parts IdentificationThe primary parts included in the Blueprint Subsea SeaTrac USBL beacon are shown here:
USBL X150 Topside Beacon
USBL X150 Topside Cable
USBL X010 ROV Beacon
USBL X010 ROV Beacon Operating Cable
USBL X010 ROV Beacon Configuration Cable
USBL Computer USB / Power Interface Cable
USBL Power SupplyAdditional miscellaneous components are included with the product, but are not shown here. All images are not to the same scale. |
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
Tips for UseThe following tips may help you operate the USBL system with better performance, or diagnose problems if they arise.
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
Deployment PlatformsSeaTrac is designed to be used from a vessel (where GPS is required) or a fixed deployment platform (where GPS is optional). The set up steps for each are slightly different.
Follow the step by step procedures for your choice of operating platform:
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
Vessel OperationsFollow these steps if working from a vessel: Set Up the Topside Hardware:
Set Up the ROV Hardware:
Start the PinPoint Program
Verify the Setup
Verify the Tracking and Commence the Operation
Post MissionFollow your standard procedures for post mission activities, which should include at least the following:
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
Fixed Platform Operations, such as from a Pier or a Dock
Follow these steps if working from a fixed platform without using a GPS receiver: Set Up the Topside Hardware:
Set Up the ROV Hardware:
Start the PinPoint Program
Verify the Setup
Verify the Tracking and Commence the Operation
Post MissionFollow your standard procedures for post mission activities, which should include at least the following:
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
AppendicesThe appendices provide information about configuring and troubleshooting the system. Configuration, including various settings and the COM port assignments for the X150 Topside Beacon and the GPS receiver, is required before the system can be used. This configuration generally only needs to be completed once, unless you make changes to the hardware or change the COM ports being used. The procedures for these steps are described on the following pages. The initial configuration includes the following items: |
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
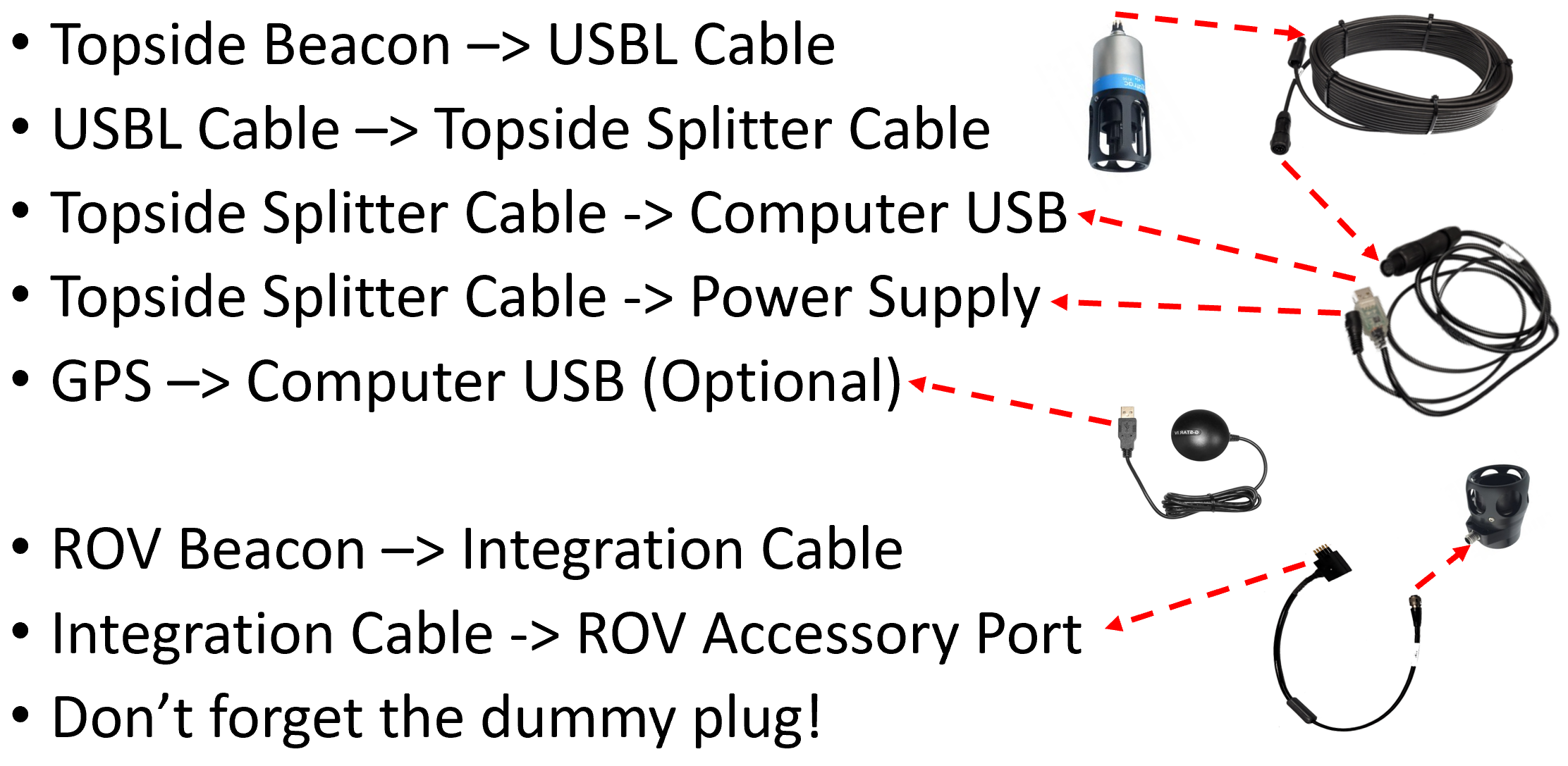
Hardware ConnectionsConnections for Operations
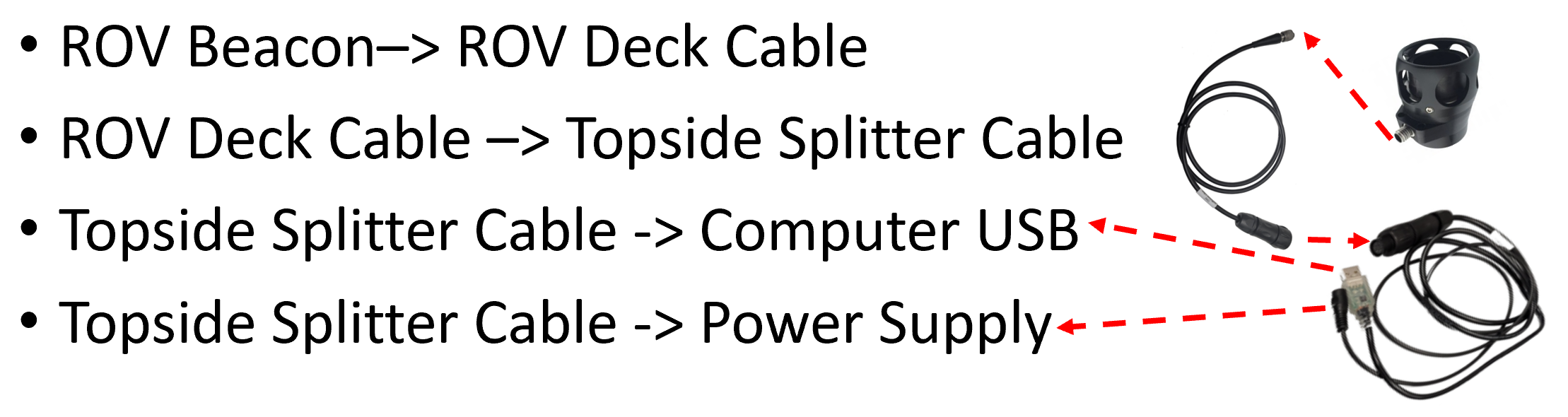
Connections for Configuration
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
GeolocationThe ROV's Geolocation is computed by adding the topside offsets to the local coordinates from the Topside Beacon to the ROV Beacon.
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
COM Port AssignmentsThe computer COM ports for the X150 Topside Beacon and the GPS receiver are assigned when these devices are plugged into the computer. The PinPoint and SeaTrac Tools software need to be configured to match the COM port assignments. The X010 ROV Beacon requires power only, so there are no COM port configuration requirements for it.
Follow these steps to determine the computer assigned COM port numbers:Set Up the Topside Hardware:
Follow these steps to configure the PinPoint Software for these devices and port assignments:
SeaTrac Tools COM Port Setup.The SeaTrac Tools program tries to use the COM port from the last time the program was executed. If the COM port assigned is not the same as the last time, the program will display an error message. Dismiss the error message and select the COM port from the pull-down list at the bottom of the window, the click the Open button. |
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
Beacon ConfigurationBeacon Configuration consists of the following settings:
Beacon IDs apply at two levels:
The first item to address is the hardware stored ID. Each Beacon ID must be a unique number from 1 to 15. The Blueprint Subsea default for the X150 Topside Beacon ID is configured as 15 and the X010 ROV Beacon ID is configured as 1. VideoRay default Beacon IDs are 1 for the X150 Topside Beacon and 2 for the X010 ROV Beacon. The number selected for the Beacon ID is generally not critical as long as it is unique and except when used with VideoRay Mission Specialist systems using Greensea Workspace, which must use the VideoRay defaults. Determining the currently assigned hardware stored Beacon IDsWhen power is applied to a beacon, its LED will blink one long flash followed by a number of short flashes equal to the Beacon ID. Configuring the X150 Topside Beacon in SeaTac Tools
Configuring the USBL ROV Beacon in SeaTrac Tools
Configuring the Beacons in PinPoint
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
Pro 4 vs Mission Specialist Use
|
|
|
Pro 4 SeaTrac USBL
Standard Operating Procedures, 1.00.00 |
TroubleshootingSee the SeaTrac manual for basic troubleshooting tips. If you are unable to resolve a problem, you can try the following steps to verify the basic operation and potentially find the source of the problem. Verify that the Beacon ID settings in PinPoint match the Beacon IDs indicated by the flashing LEDs on each beacon. If they do not match you will need to change the Beacon IDs in PinPoint or on the beacons themselves using SeaTrac Tools. If the system reports errors when trying to start tracking, check the COM port settings for each device. If you are not using the GPS receiver, you should remove it from the COM port setup so PinPoint does not try to open it. If you do not see the ROV Beacon panel in the map view, you need to add the X010 ROV Beacon in the Beacon setup section of the settings. If you are not getting ping responses from the ROV Beacon, check to make sure it is enabled on the ROV Beacon panel in the upper left of the map view. It's icon button should be highlighted. If not, click the icon button. If you can't immediately resolve the problem using the above information follow these procedures to verify that everything is set up correctly.
|